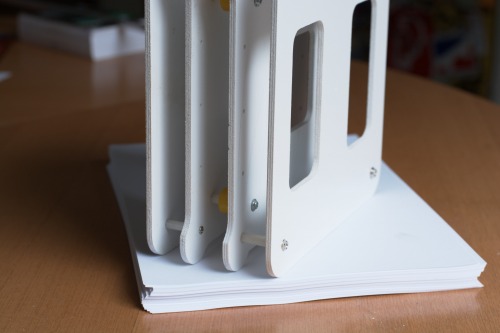
Starting a new robot with a quadratic baseshape.This is my second robot concept and I plan to use ArduinoMega + Raspberry Pi combination for this project. The project is in an early state and I will use this page as a project progress and image collector.
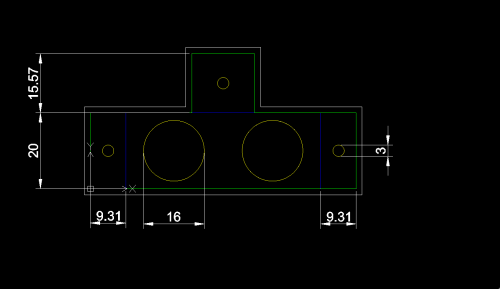
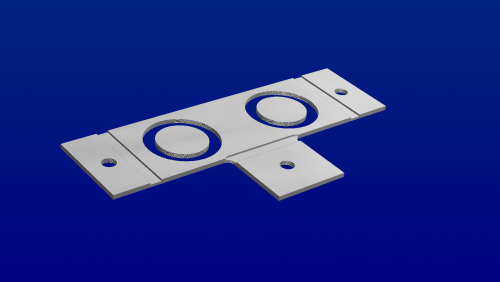
Foldable housing for the 4x sr04 ultrasonic rangefinders. I want to mill it in 1,5 mm aluminium / 3mm two bladed tool. I need four of them... One additional mountingpoint on both side and one for the base...
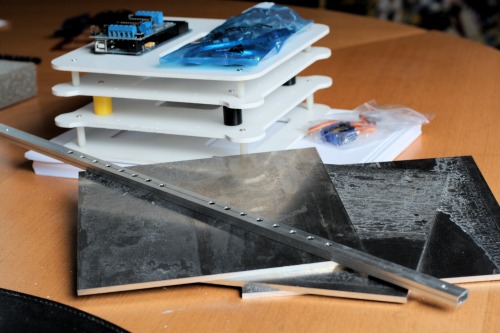
Today I milled the housing for the SR04 ultrasonics and some baseplates for the sensorhead - I need three more of this. The parts came out nicely - looks usable :D
Why 12V? I am interested because I am building a pneumatic actuator set, and my current compressor needs 12V. I thought 12V was not used often. Does it also mean you have 8 - 10 batteries in series?
I plan to use only one central 12v lipo akkupack with downregulated circuits to 6V for the microcontrollers, 9V for the motorbridge and 12V for the audio amplifier. Power was a big problem in my first project. I don’t want to use batteries in series. But at the moment I am not sure if it is better to use 9V packs - and upregulate or 12V and downregulate it. I don’t have sketched a circuit at all at the moment, just a vague idea. What is your concept to implement the compressor?
Looks interesting. What’s the material of those layers? Do you want to place the driven wheels in the center of the robot since you want to use two ball caster wheels?
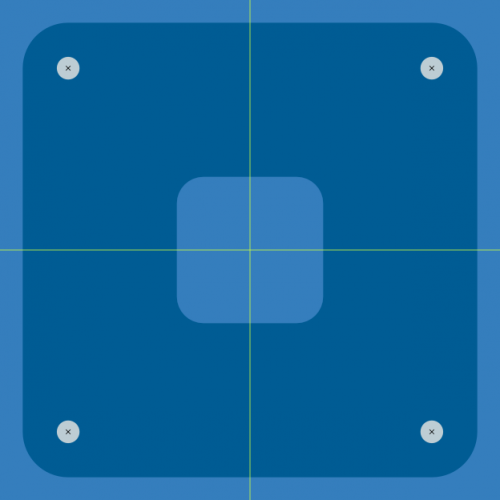
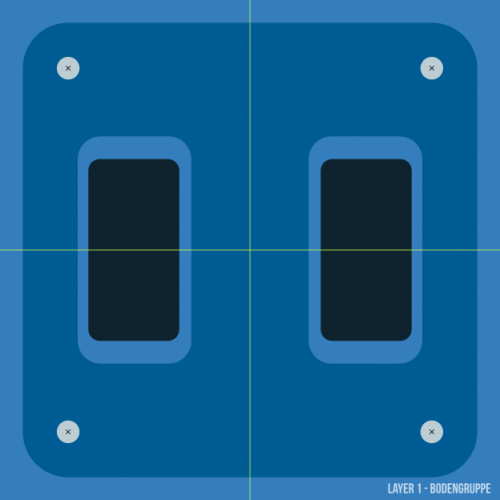
The material is 4mm PLA, milled with a 3mm tool. The two wheels should be exactly on the centeraxis. The next step is to create a working gearbox mechanism and the bottom group with encoders and endswitch-bumpers on each side. This group should be made of aluminium and M-Screws. The gearboxes should fit in the two bottom-slots and should be exchangable (maybe I can switch to legs or tracks later). The bottom slots and gearbox should be connected with hydraulic shock absorbers or bumper-pads… Bad suspension was one of the other many problems with my first robot. On higher speed there was just too much torque and vibration.
Well, that sounds interesting. But of what speed we are talking about if yu need suspension? Except some really advanced robots here on LMR i did not see any with a hydraulic suspension.
Maybe suspension is the wrong expression - I need nome kind of shock absorbing. My first bot “jumps” over carpets on higher speed. It is a pain for the little gears in the gearboxes - you can hear them grinding. The result is vibration on all other parts which leads to wrong sensor-readings. I need a solution to reduce the attrition in the gearboxes…
Big wheels, slightly greasing gearboxes and a good motor control algorythm may be improve it. Then about the sensors you can set the noise filter higher when moving, and add a bias toward the direction of driving. For example if it’s moving forward and infrared see that distance is greater, probably the bot has stumbled on the carpet:)
Better filtering is on my list. Smoothing methods for sensor-jittering, too. Thanks. I have to implement in an early stage. The motorramps were good with my first bot - with speed/distance fittings, dampings, etc. Big wheels are not possible. Hmm. The diameter is max. 5cm for one wheel. Maybe it is a good solution to mount the gearboxes with rubberpads - and a shock absorbing wheel and rubbertires for the wheel. I have to find a solution for this. The basic idea is to use the arduino for the lowlevel code, like motorramps, endswitches and sensor readings. The raspberry pi should do the highlevel code with python pyro, a little webserver based on Flask / jinja2, image processing with openCV and audioprocessing with native python. But you are right - it is important to think in an early stage about the motorramps, too. I have to think about it.





 Gruß aus dem
Gruß aus dem