

Finally got around to starting the write up for my quadcopter :)
bought most of the parts from hobbyking:
the frame:
http://www.hobbyking.com/hobbyking/store/__22781__Turnigy_Talon_Quadcopter_V2_0_Carbon_Fiber_Frame_550mm.html
The motors:
http://www.hobbyking.com/hobbyking/store/__26961__Turnigy_Multistar_4830_480Kv_22Pole_Multi_Rotor_Outrunner.html
The ESC's:
http://www.hobbyking.com/hobbyking/store/__13429__HobbyKing_30A_BlueSeries_Brushless_Speed_Controller.html
Camera tx/rx:
http://www.hobbyking.com/hobbyking/store/__15295__Boscam_5_8Ghz_200mw_FPV_Wireless_AV_Tx_Rx_Set.html
Cameras:
http://www.hobbyking.com/hobbyking/store/__11977__1_3_inch_SONY_CCD_Video_Camera_PAL_.html
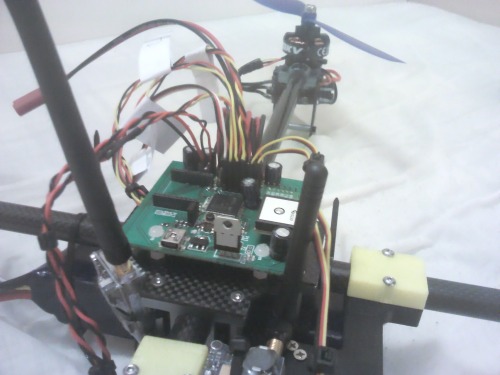
Decided to make my own electronics. A small 4 layer board for the quadcopter, with accelerometer, gyroscope, compass, GPS, pwm drivers etc. I also made a board with a small LCD touchscreen attached for use in the controller. This also has GPS, accelerometer, and compass.
The Quadcopter uses the same ARM chips I have used before,

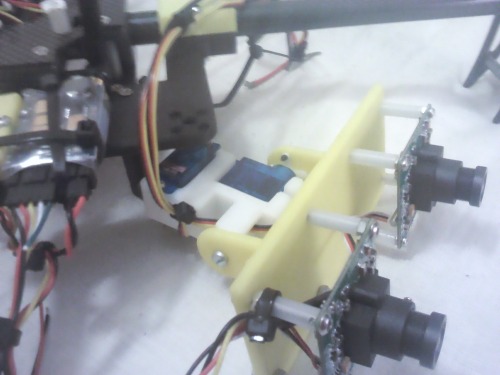
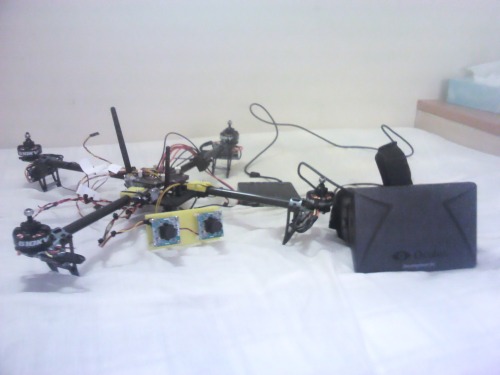
The quadcopter has dual front cameras, I was vaugely thinking to make a program to use the oculus rift for 3D fpv, but i'm not sure I will ever get around to it :) I was also thinking I could include the head tracking feature of the rift to move the cameras :)
The controller:


- Actuators / output devices: 4 x brushless motors
- Control method: XBee
- CPU: STM3240
- Power source: 4S 5000MaH LiPo
- Programming language: C++
- Sensors / input devices: GPS, compass, accelerometer, Handheld Controller, gyroscope, cameras
- Target environment: outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/quadcopter
