Hello, I am new to this forum. I have had a lynxmotion 4 DOF arm for a while. I have not done much with it other than put it together and record some simple routines on it.
Now I am branching out and creating a parallel robot. I have a friend who works at Adpet Technologies, and he has shown me movies of their delta robot. I was very impressed, and fairly confused about how it actually works. I thought the best way to understand it, would be to make my own.
They use 4 DOF on their arms, instead of the more common 3. Here are some pro’s of and con’s of the two different configuration I have discovered during my project.
Con’s – over defined condition. One motor can never be driven independently or the linkages will bind. This causes a slightly more complex control algorithm, and homing routine.
Pro’s – one more motor means better acceleration, rigidity.
Both version can control theta, but the 4 arm version uses the positioning arms to control theta, rather than the more conventional use of a theta motor with 3 arms.
I have had the arm moving with the lynx terminal, but I still can’t find a copy of my sequencer that came with the original arm. I am currently trying to get the SSC-32 to interface with MRDS 2008 R2, but have not had any luck. If anyone has any suggestions, please let me know. I am not planning to use a microcontroller at this time, but may transition to one, once the majority of the development has been completed on a PC.
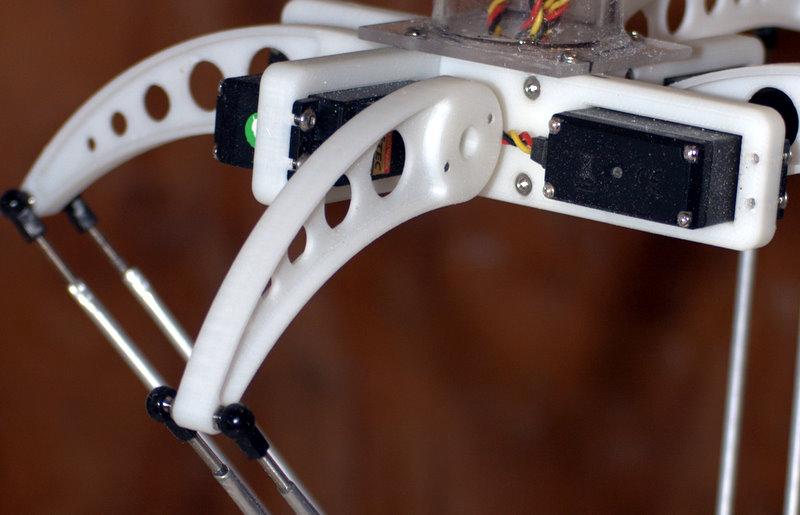
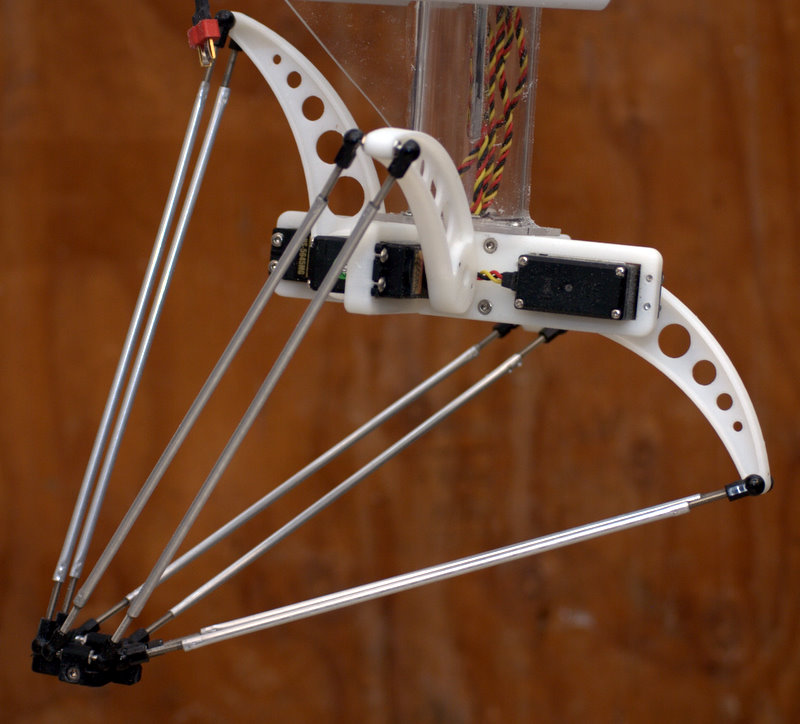
I have included a few pictures of the current setup. I would be happy to share as much information as I can. I have designed the parts in SolidWorks and will share those also. Once I get some videos of coordinated moves I’ll post them.
Thanks for any help offered. http://lh6.ggpht.com/_Q4QXCZjFp0E/S20Wxei3thI/AAAAAAAAABY/TskHNGI1_JU/s144/DSC_0004.jpghttp://lh5.ggpht.com/_Q4QXCZjFp0E/S20WyCKXLCI/AAAAAAAAABg/nNmvwhvpVd4/s144/DSC_0005.jpghttp://lh5.ggpht.com/_Q4QXCZjFp0E/S20WykGZojI/AAAAAAAAABk/tVpKjS-tt5M/s144/DSC_0006.jpghttp://lh6.ggpht.com/_Q4QXCZjFp0E/S20WzcKDYiI/AAAAAAAAABo/taIt8Qaaq5I/s144/DSC_0011.jpghttp://lh3.ggpht.com/_Q4QXCZjFp0E/S20W0FYBzYI/AAAAAAAAABs/XdPlROJDaU0/s144/DSC_0014.jpghttp://lh6.ggpht.com/_Q4QXCZjFp0E/S20W03gFb7I/AAAAAAAAABw/KRF0upO2kcw/s144/DSC_0003.jpg
My goal for this project is to increase my understanding of the control methods for this style arm. I want to optimize the arm to maximize the balance between precision and speed. Longer term goals would be to have the system interact with simple game boards like checkers.
Software control is my current hurdle. Lynx terminal communicates with the SSC-32 and allows simple movements, but it appears the this board does not have drivers for the current release of MRDS. I will try using either C++ or Labview, since I have slightly more experience with them.
On the mechanical side, I have found that the standard hobby ball links have more slop then I would like. The drive arms also have some torsion issues. I have addressed these issues with some tube arms using higher precision balls for the links. I have also modified the cups to allow a greater range of motion. I should have the arm upgraded in about a week. Along with this change I will be increasing the length of the driven links (the two rods attached to each arm). Also a finer length adjustment will be added to the links, since this appears to be critical to accurate movement. The arms and links are also getting longer to improve overall travel. I found that the servos have plenty of power to drive longer arms.
i like your ideas. and as i said before the finish is really clean. great work there.
The third picture is my best. looks predatory in a strange Delta arm kinda way.
i couldnt see much going on at that bottom plate as far as detail. i say this as i was wondering what would happen if you only moved one servo. so from what i can see it doesnt work like that. does the bottom plate allow for this. if it did you could introduce tilting?
of cause 'you would need to modify the other arm balls and links to allow for the tilting as the links will twist. might be worth exploring even if its not one of your future accomplishments. ?



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}