

update 7/12/11
At last got enough code together to get a painfully slow actively balancing crawl to work, but must be able to do better than this ? Servos holding up ok so far, but bought some spares as they seem to be pretty much at their limit. Still if they werent as cheap as they are, I couldnt have even attempted this bot, they are amazing good for the price.Next couple of weeks will try to get the walk easier and then turning left right. Beginning to think that solving one will solve the other.
//--------------------------
Hi, for 2 years I've wanted to, but chickened out of, build a quad with foot 'pressure' sensors. With cost and time as excuses for not.
But with the very cheap 8g servos and the good-looks and convenience of the spider contoller I felt I had no excuses left and had better get on with it.
Should stress here that I have no expectation of success, but do feel the need to get it out of my system and put the idea to rest one way or another.
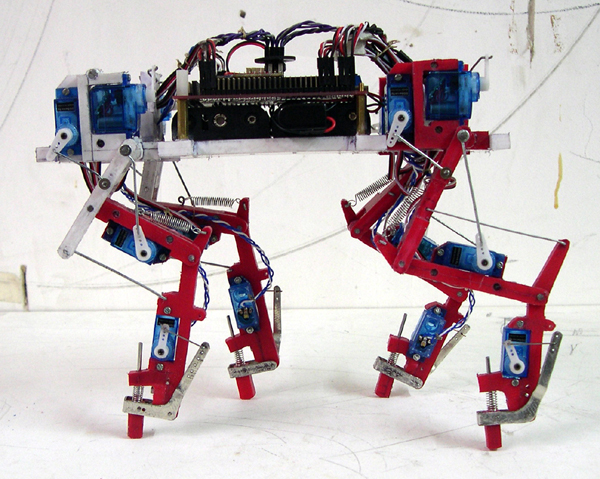
Have gone for the simplest build I could think of for a 12 servo quad and tried not to use anything other than stuff i had laying around. ( except for the servos and board of course).

from blank sheet of paper to the finished physical build took around 42 hours spread over about 3 weeks of evenings and weekends.
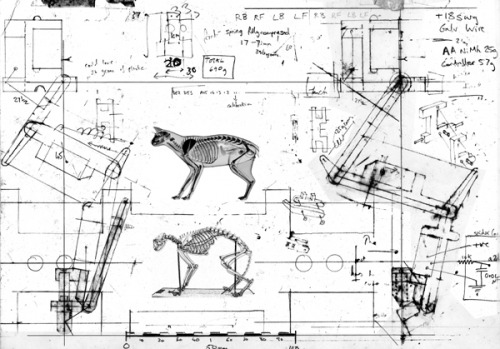
cutting out the first leg took about 6 hrs of jigsawing, drilling etc

the other 3 only half the time once i knew what i was doing (kind of)

the final version of the very crude foot sensor, just took everything except the pot + the gears on the pot shaft out of a servo and used that. It seemed an easy way to mount a tiny pot.

Finally added a little sub-board to the controller, with some simple filtering for the foot pots and a genral purpose 10k preset to help with the calibration and debugging. The more I look at this thing the more flaws I see in it and the less likely it will ever walk at all. But fingers crossed I will get on with the programming and post vids if anything does happen.



attempt to walk
- Actuators / output devices: 12 Servos
- CPU: red black spider controller
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/quad
 However, can’t wait to see the video of it#s first walk…I missed this for my quadruped when he was fell over after one step
However, can’t wait to see the video of it#s first walk…I missed this for my quadruped when he was fell over after one step