

Update 3/27: Per request, I've attached the code I used for this guy.
--------------------------------
This is my next little object-avoider, made from spare parts from around the house. I actually made this guy a while ago, but I wanted to try to program a fun personality for it. Since that never happened, I'll just post it and move on.
Parts: Since the bot is powered by low-torque pager motors (yes, with pepsi caps for wheels), the body needed to be lightweight. So i made it out of some old CD cases. I accidentally stepped on the plastic partway through the process, so I ended up with lots of little plastic parts. no biggie; now the shell is just made from lots of little parts. The buck-teeth are made from an outlet cover.
This project also used my first robot part ever: my picaxe project board. While creating my own "Start Here F-type" robot, I accidentally soldered the A/B motor ports into oblivion. So as you can see, I bypassed them, and soldered pins directly to the motor driver chip outs. the rest of the chip is plugged into the board.
Code: I haven't had much success with servos, so I wanted to make an object avoider that didn't use one. To avoid getting snagged on the "blind spots"to either side of the sonar sensor, I made it wiggle from side to side as it moves forward. (I noticed that crabs, who can't move their heads, do the same thing). The goal was to make the bumper switches unnecessary.
Instead of programming "turn left / turn right" subroutines, i made a single "turn" that either went left or right based on a "direction" bit variable. The main loop then includes an "inc direction" line that toggles which way to go. That way I only have to say "go forward for X, then turn" instead of "go forward for x, turn left, go forward for x, turn right".
QUAB also has a speaker that beep-bop-boops one of dozens of little sounds when he encounters objects, in an effort to give him some personality. But there was a lot of background noise in the movie, so you'll have to take my word for it.
The top of the shell is taken from the same scrapped toy that provided my other bot's housing.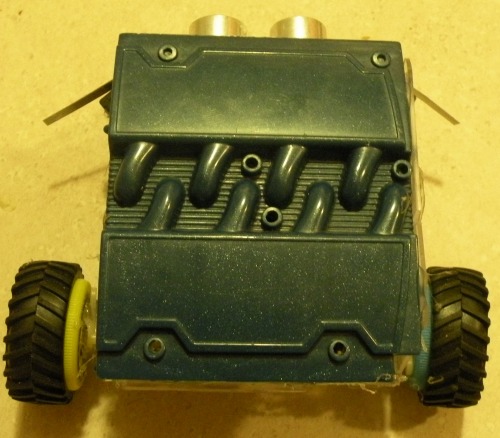
Looks tough, doesn't it? The treads are extra Tamiya treads from the infamous gearbox.
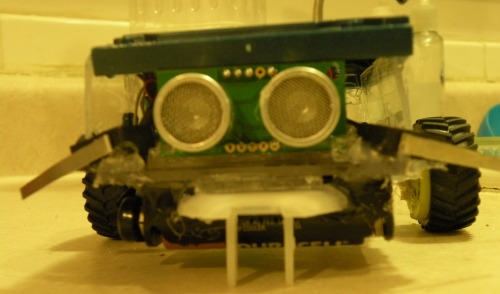
I vant to avoid your object. blah!
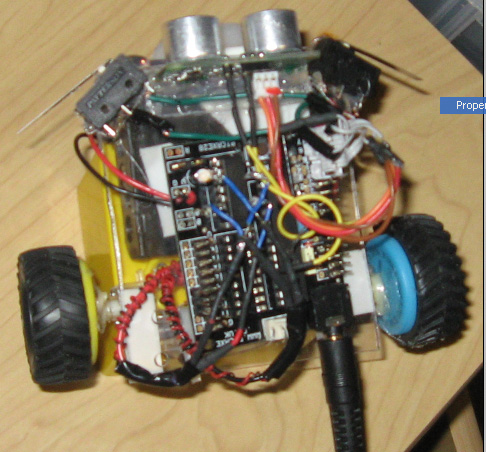
my jimmy-rigged h-bridge (blue wires).
Object Avoidance
- Actuators / output devices: speaker, 2 clipped gm10 pager motors with pepsi cap wheels
- Control method: automomous
- CPU: Picaxe 28x1
- Power source: 3 AA Batteries
- Sensors / input devices: SRF05 Ultra Sound, bumper switches
- Target environment: indoor, very smooth surface
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/quab

