

Another robot has been added to the shark tank ;) Video added enjoy.
This robot was built for the 2011 RoboGames in San Francisco. The name was inspired from the "Spark" motors purchashed from Fingertech Robotics. I have also utilized the Tiny ESCs from them as well. This helps a lot in weight and ease of use.
So without further ado the pictures:

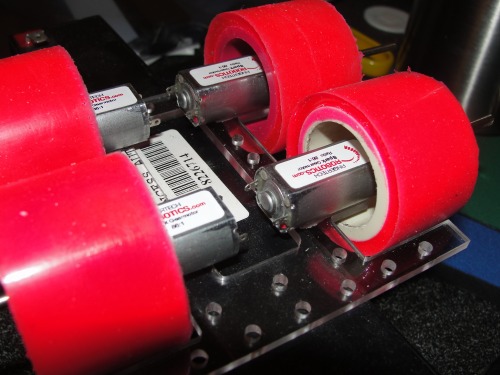
The Spark motor. Great size, power, and price for minisumos.
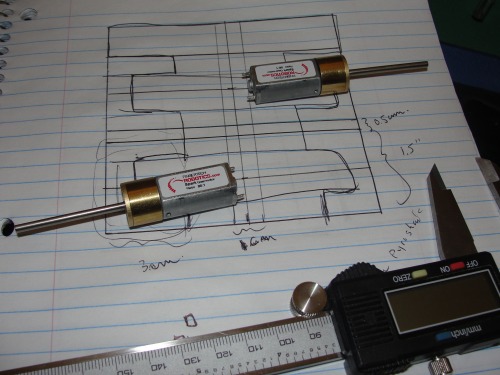
I start my robot designs based on the motors. This way I won't be surprised in the end if something doesn't fit right.
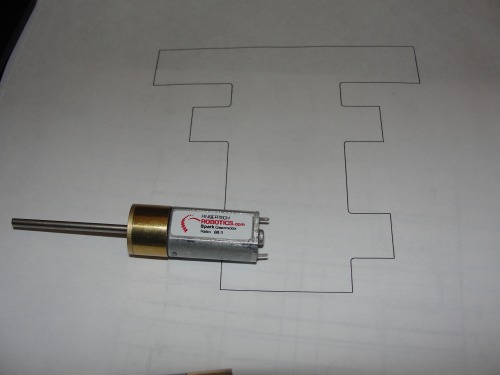
Here is the first iteration of the base plate for the robot.
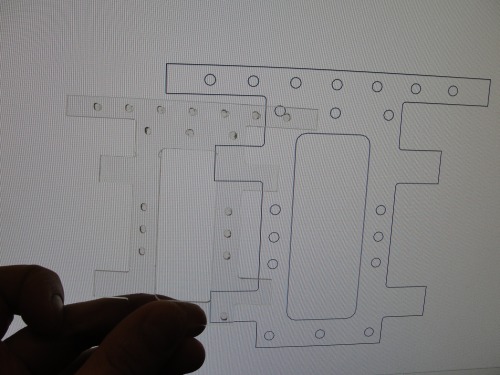
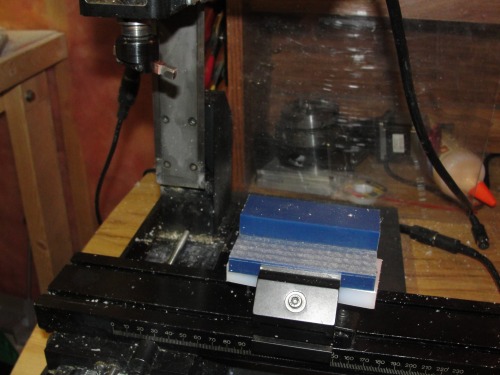
After some tweaking and I was happy with the design, I milled it out on the CNC.

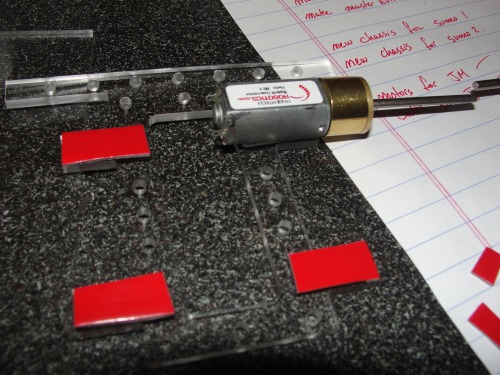
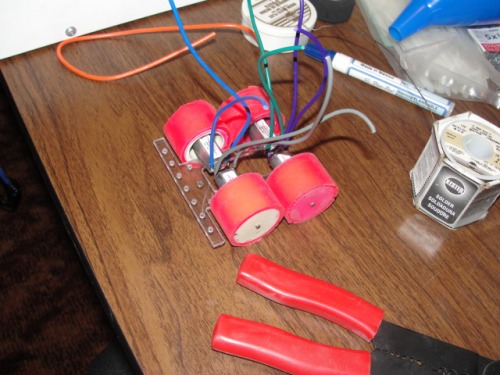
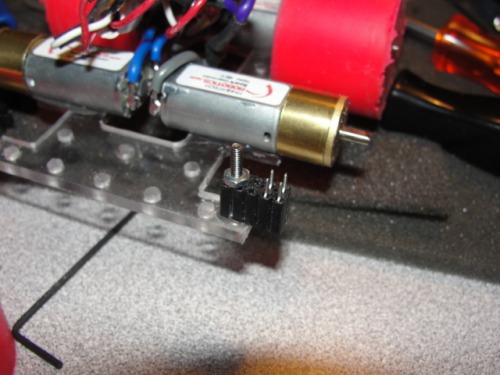
I wanted to attach the motors securely, but have the ability to remove them if I needed to at this point, since I wasn't sure if I had enough spacing for the wheels yet. This heavy duty mounting tape did the trick.


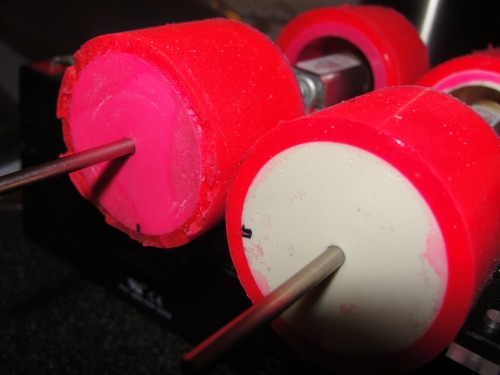
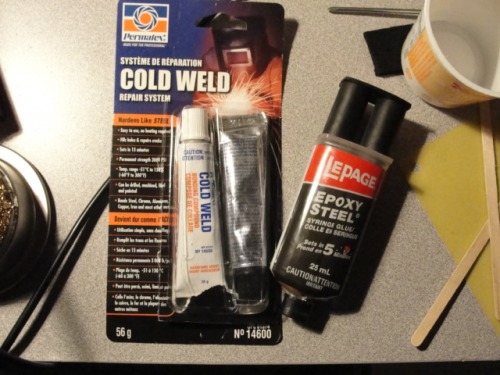
Wheel time. I made a master hub out of PVC electrical conduit pipe. Inside is a disc of acrylic to cap it off.

I then glued it to a piece of scrap acrylic in preperation to form my master mold.

Mold time !!!

After a while I have a mold that can reproduce my master hub with little effort :)


And out pops a hub.

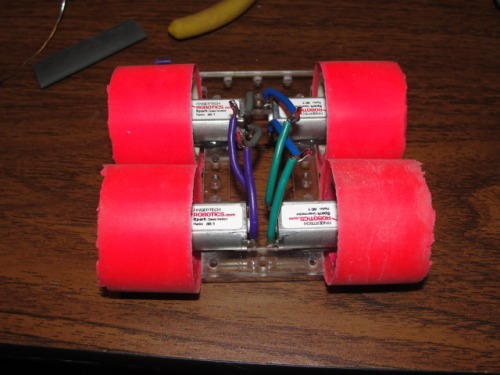
I had some fun with the colours.

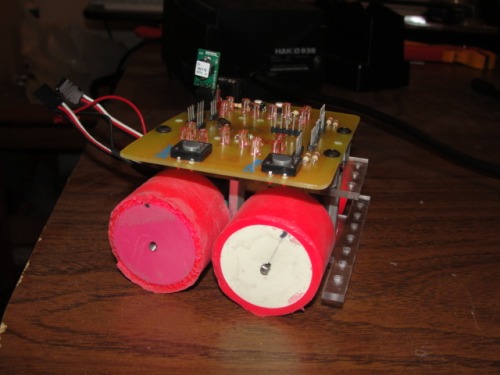
Looking good so far.

The rubber is put on the hub with a very similar process.
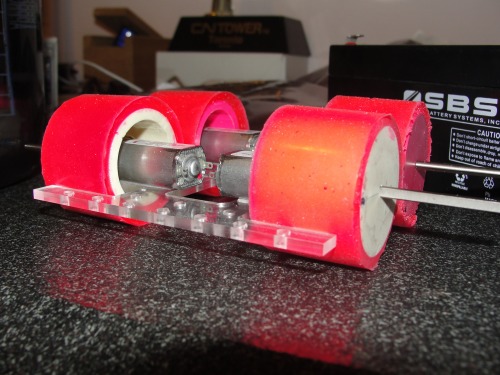
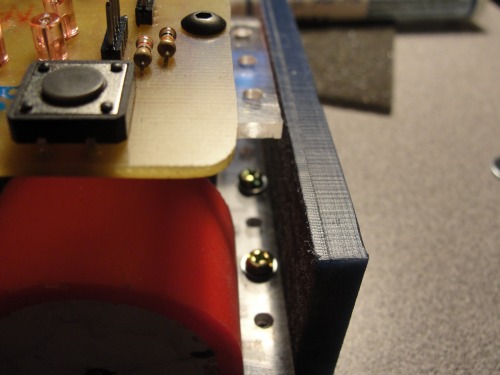
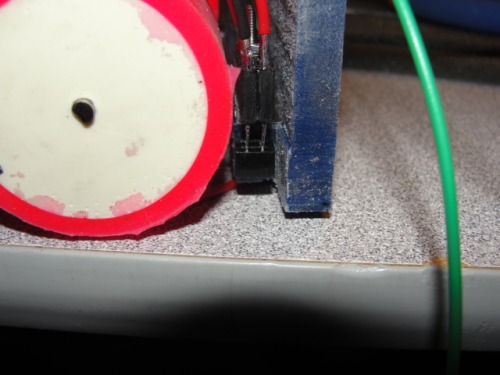
At this point I notice that the wheels at the front are rubbing on the base. It is a good thing I use the mounting tape.

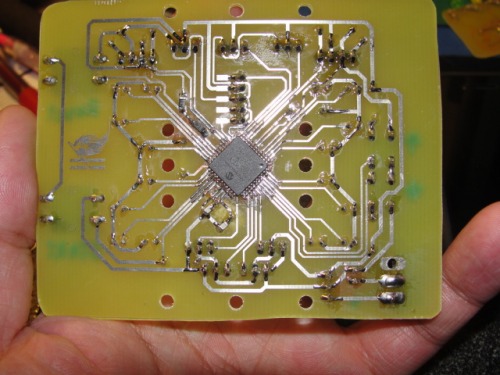
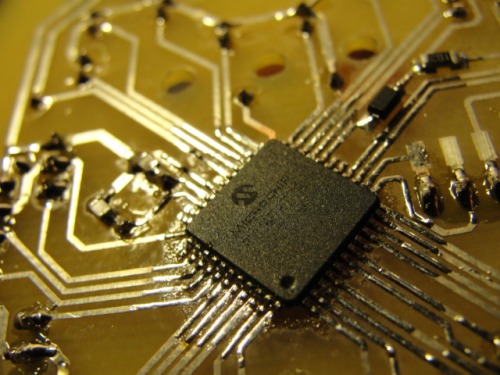
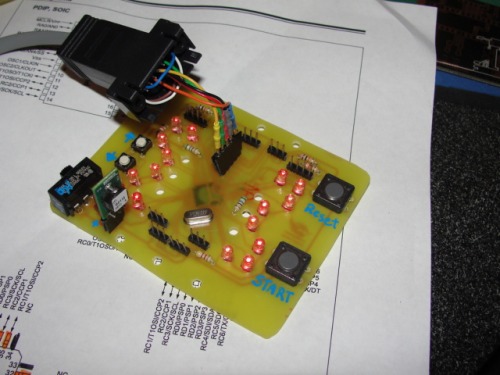
The main board is designed, etched and populated.

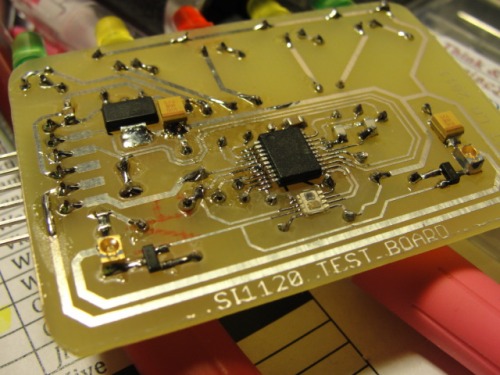
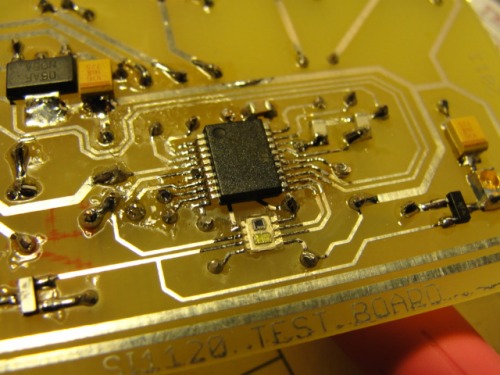
Here is the SI1120 IR sensor. Mainly used for touchless interfaces. It seems like a very good robot sensor.
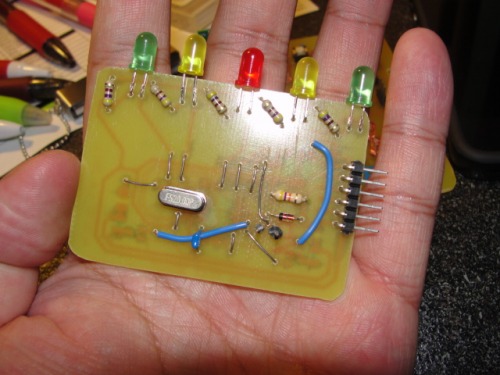
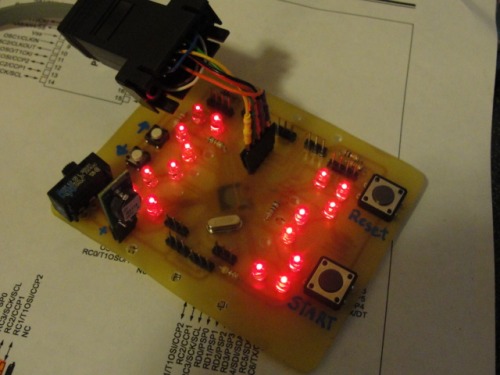
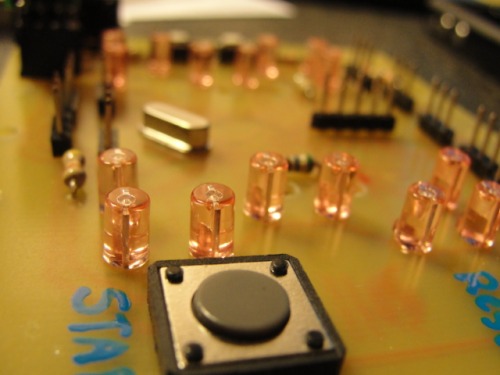
LED test.


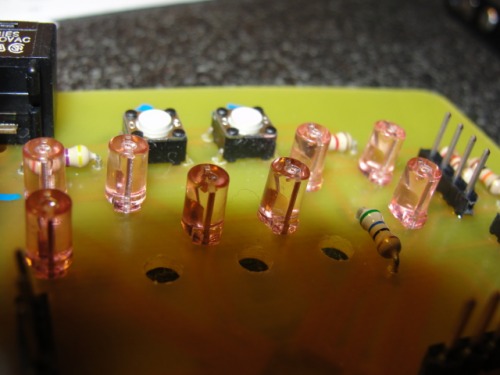
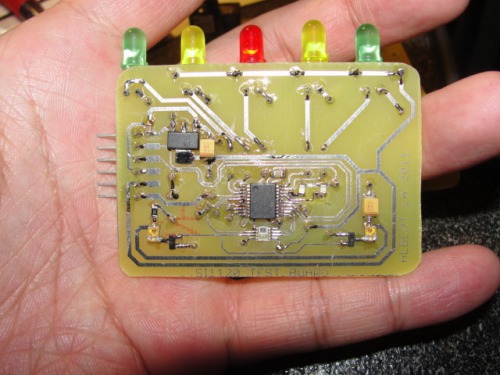
Sensor test.

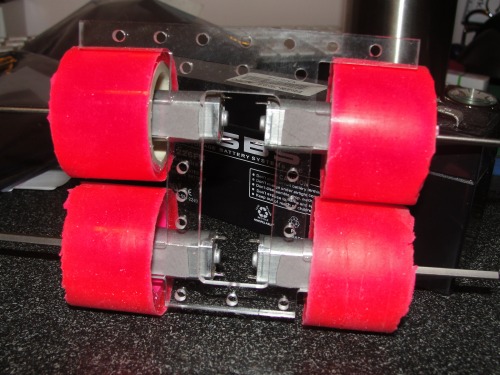
A new base plate is cut with some of the dimensions adjusted. Time to permanently mount the motors. No turnbacks from this.

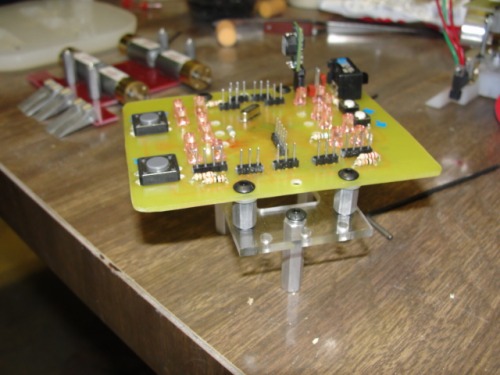
But all is not lost for the old base plate. I chopped off some bits and used it to help me mount the board.

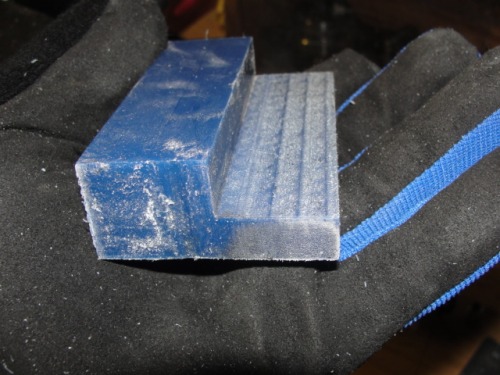
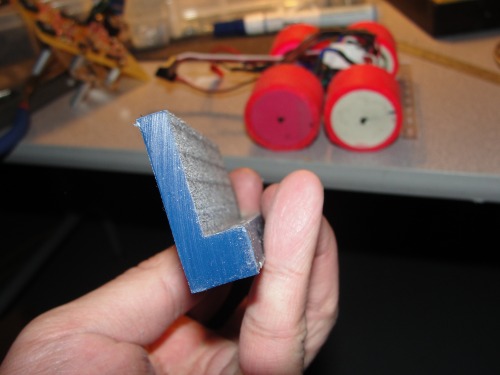
The scoop/wall is milled out of UHMW. It worked for Blaster Shark, so it should be good enough for Flame Shark.

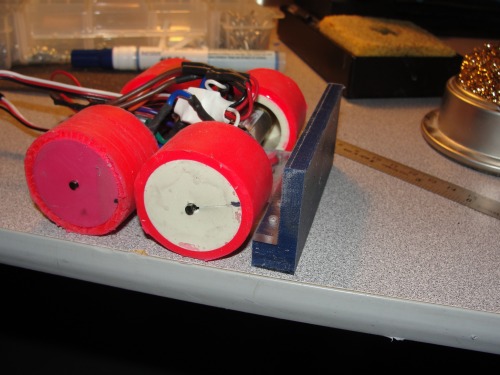
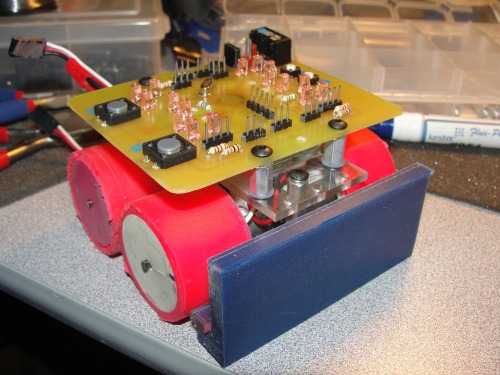
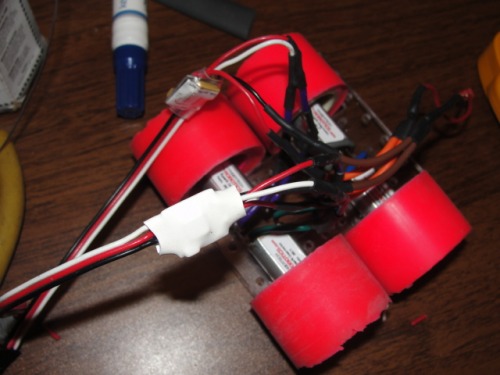
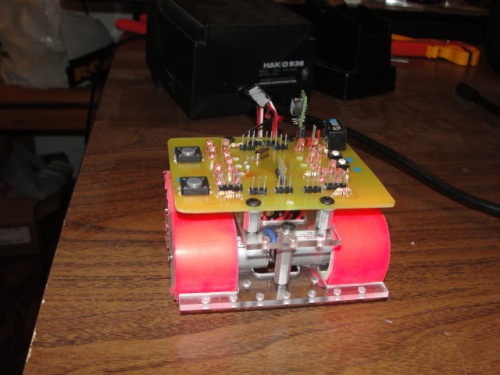
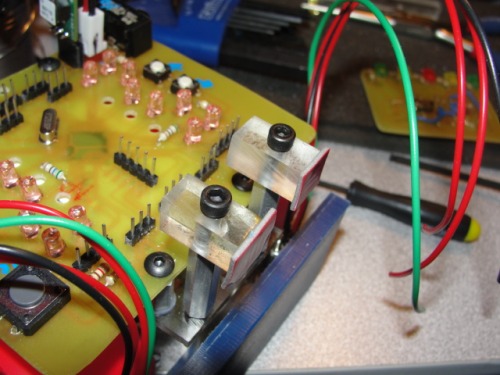
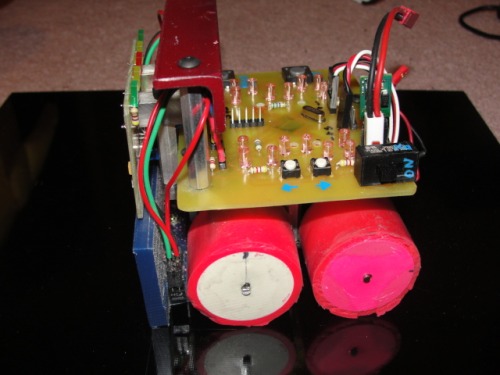
Preliminary fitting of everything.
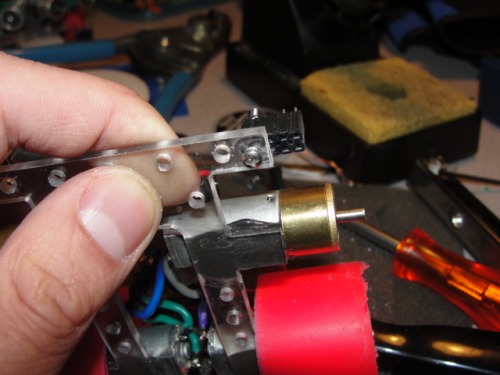
The line sensor mounts are attached with screws so I can adjust the height if needed.

Some mods to the scoop/wall to accomodate the sensors.
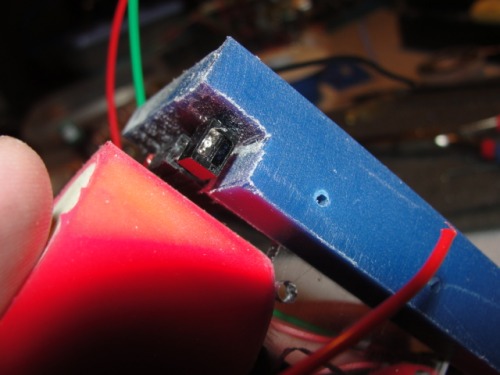
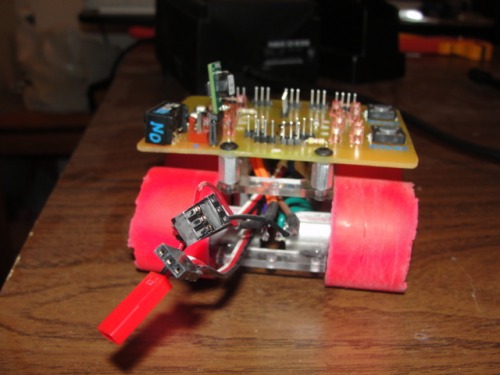
Time to mount the main sensor.
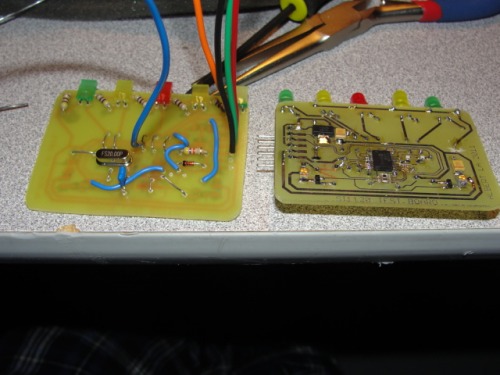
I made two sensor boards. The one on the left will be mounted to the robot.

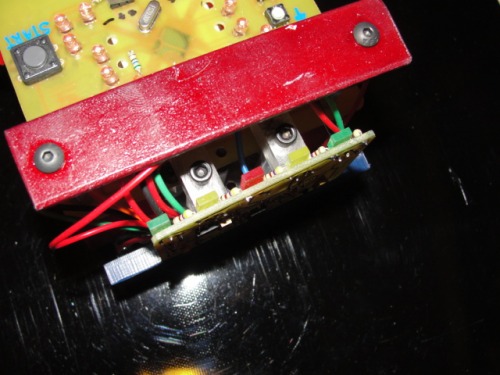
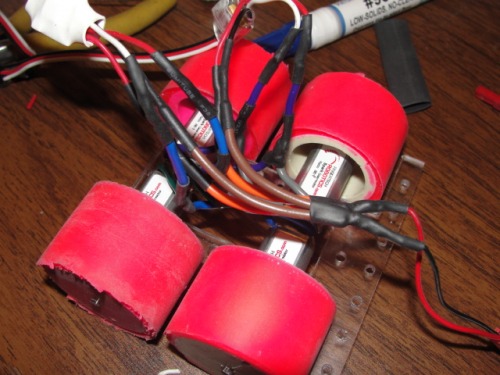
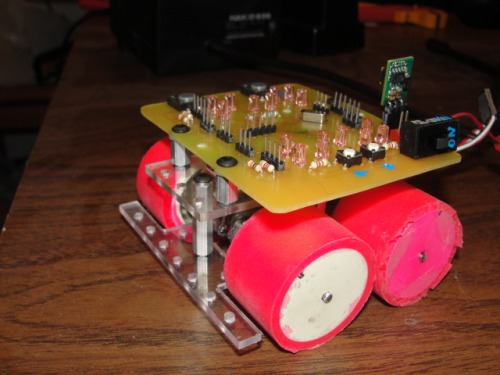
Sensor mounted. The red bar at the top is mild steel. The sumo needed to gain a little weight, which helped a lot with traction.
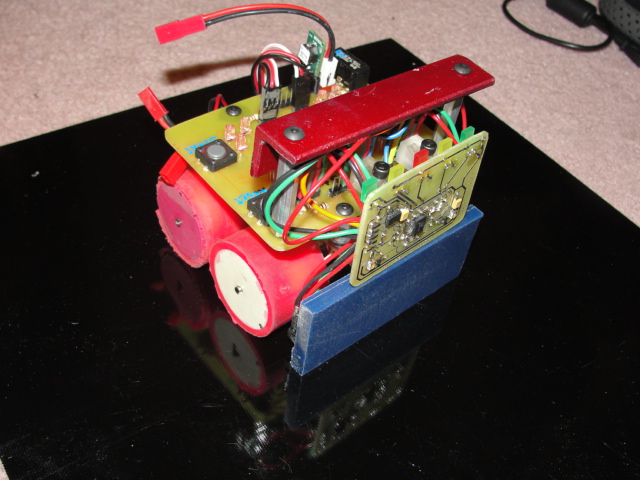
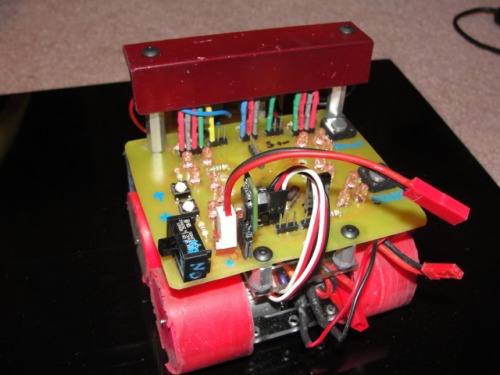
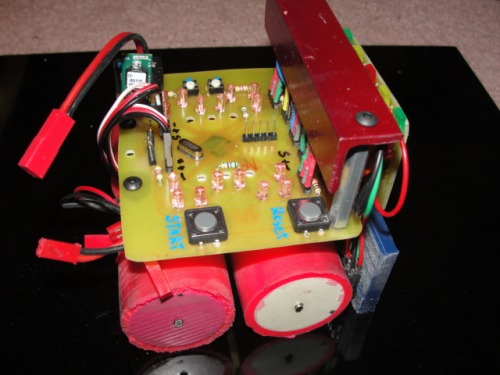

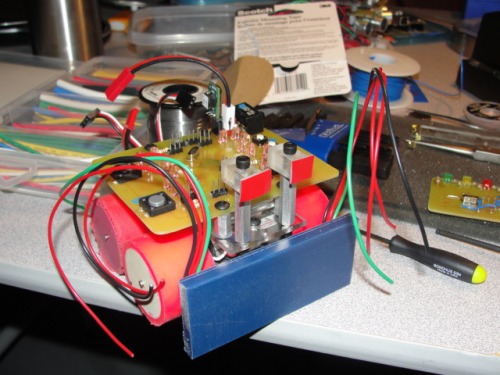
Robot Complete :D
Push other robots out of the ring
- Actuators / output devices: Fingertech 86:1 Spark Gearmotors
- Control method: autonomous
- CPU: Microchip PIC 16F877A
- Operating system: Embedded C
- Power source: 11.1V 360mAh lipoly
- Programming language: C
- Sensors / input devices: SI1120 IR sensor
- Target environment: indoors, on a dohyo(sumo ring)
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/pyrostriker-flame-shark-sumo