Hello everyone.!
I hacked together the above mentioned robot from two wheelchairs to help me around the farm, and I am controlling it with RC to a Sabertooth 2X60. It works well and is a strong capable machine.
My 89 yo Dad is unable to walk, and misses getting outside to take care of his gardens and flower beds. I am modifying the above machine to carry him and allow him to control it with a joystick. I would like very much to be able to use the DEscibe software to program the Sabertooth 2X60. The documentaion on the 2X60 mentions programming it with a usb adapter. Could someone please suggest a compatible USB adapter and how to mate it to the 2X60?
Thank you!
Hello @BambooDave and welcome to the forum!
That is such an awesome project, it would be great if you could share it in the Robots section 
In order to program the Sabertooth 2X60 you will need a USB-to-TTL Serial Converter like these:
You can find other models here.
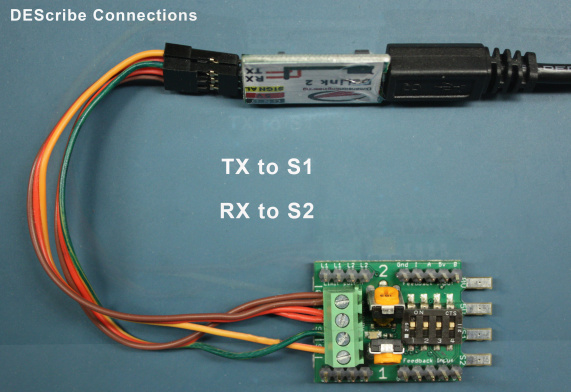
And here are the connections you should make:
You can find more information on the following links:
https://www.dimensionengineering.com/software/DEScribe/html/
https://www.dimensionengineering.com/appnotes/Roborealm/Roborealm.htm
And you can download the DEScribe software here
I hope that information can help you out
Good luck with your project 
Thank you so much for your prompt and detailed response! I’ll order some parts, and see how it goes.
1 Like




