

Project Robokut - (1) Design Overview
Project Robokut - (2) Sensors
Project Robokut - (3) Mechanics & Electronics
Project Robokut - (4) Programming (Coming Soon)
Project Robokut - (5) BOMaterials
Wheels



Commercial robot lawn mowers tend to use custom, injection-molded wheels. Since this is not an option, we might consider using 3D printing to create highly functional wheels, but in the spirit of making the project accessible to the masses (many of whom still do not have access to a 3D printer), a functional commercial wheel must be found. The larger the radius, the more ground clearance the robot will have. Considering the ideal cutting height varies between 1.5 inches to 3.75 inches, a 7” to 8” diameter wheel would be needed. There are not many inexpensive wheels in that range which are intended for general purpose hobby robotics, and include:
https://www.robotshop.com/en/6-higrip-rubber-wheel-tetrix.html
https://www.robotshop.com/en/6-higrip-rubber-wheel-black.html
https://www.robotshop.com/en/8-first-wheel-rubber-treaded.html
- https://www.robotshop.com/en/8-pneumatic-wheel.html
The best value of this selection would be the 8” AndyMark, though contrary to other lawn mower wheels, this one has solid rubber without a tread pattern on its outer diameter. We will need to see if this works well on a lawn, though fortunately it would be ideal for indoor testing on ceramic. Since this wheel would be driven, the more aggressive the pattern the better it will grip the soft grass.
Caster



Finding a caster intended for use on a lawn did not prove easy, so a generic caster must be considered. Ideas include:
General purpose caster from a local hardware store.
The caster we ultimately chose for the prototype was from a local hardware store as the price was <$3 USD each. Additional mounting holes / slots are included with the CAD if you want ideas on how to mount your own caster.
Propulsion
The details of the drive motors used on commercial lawn mowers is rarely provided by the manufacturer of the mower. As such, how might you estimate the rpm and torque needed by a custom mower? The following tool gives a very good ballpark of the torque and RPM needed:
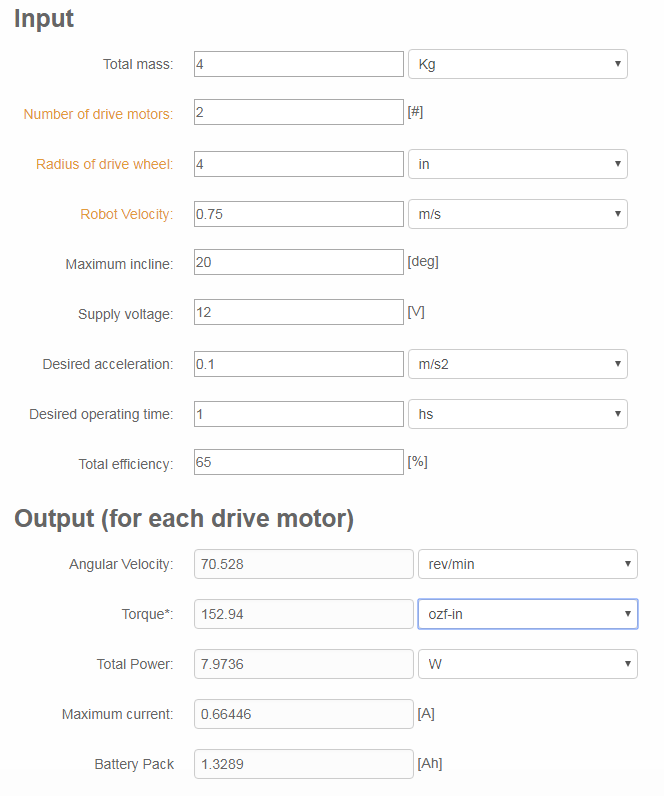
Since many of the values are still not known, we can estimate:
Total mass: initially estimate 2Kg (including the battery) - fairly lightweight.
Number of drive motors: 2
Radius of drive wheel: 4 inches - larger wheels
Robot velocity: 0.75m/s (not too fast)
Maximum incline: 20 degrees
Supply voltage: 12V (can also use an 11.1V LiPo)
Desired acceleration: 0.1m/s2
Desired operating time: 1 hour
Total efficiency: 65% (hard to estimate, but low assuming spur gear motors)
Gives:
Angular velocity: 70 rpm (minimum). We can certainly choose higher.
Torque: 152oz-in (worst case scenario). The motor should work at this value, but will normally be around half this value or less on flat terrain.
The data provided for total power, battery pack and current requirements do not take into consideration the motor used for cutting, nor the efficiency of this motor. The battery will therefore need to be selected based on other criteria. The following motors were found which all have the same mounting pattern:



https://www.robotshop.com/en/12v-1311-250oz-inc-metal-gearmotor.html
12V nominal voltage
250 oz-in
2.5A stall current
80rpm
6mm diameter shaft
https://www.robotshop.com/en/cytron-12v-17rpm-1944oz-in-spur-gearmotor.htm
12V nominal voltage
194 oz-in
2.6A stall current
17rpm
6mm diameter shaft
https://www.robotshop.com/en/cytron-12v-24rpm-210oz-in-spur-gearmotor.html
12V nominal voltage
210 oz-in
3.8A stall current
24rpm
6mm diameter shaft
If we select the 8” Andymark wheel, the compatible hub (6mm diameter bore to Andymark / Colson hub pattern) would be: https://www.robotshop.com/en/set-screw-hub-6mm.html
Cutting


The cutters used differ based on a variety of parameters:
Cutter diameter: 7” (18cm) to 22” (56cm)
Number of cutters and their configuration (one to four are most common)
Cutting edge
Cutting motor RPM / power (25W to 400W)
There are many reliable ways to cut grass:
Spinning, sharpened metal (fixed or pivoting blade)
Spinning, sharpened plastic
Rotating blades (as you might find on a manual mower)
Spinning cord (as you find on a trimmer / edger)
Most commercial mowers use one or more solid metal discs with sharpened edges. These are custom designed and built for the robot and could potentially be used for the Robokut mower. Since Robokut is DIY, having fast spinning, sharpened metal is incredibly dangerous, we’ll see what other options might work well.
Trimmer cord
The cord from a trimmer effectively cuts not only grass but also small plants and although getting hit by one might break the skin, it would not sever a body part. The issue encountered during prototyping however was that the small piece of cord would often get tangled around itself very quickly. The cord would also need to be replaced after each use.


Sharpened plastic
A step or so below a spinning piece of metal would be a spinning piece of plastic. Plastic breaks well before metal, but can still inflict quite a bit of damage.


Tie Wraps
Given that the trimmer cord wrapped onto itself because it had no sideways rigidity, the option of using a different piece of plastic came up - and tie wrap / zip ties seemed like a good option. Small zip ties were tested initially, and although they cut the grass very well, they did not last long. Thicker / stronger zip ties were used and although one or two were broken after use, their cost was so low that they were used in the final design. Zip ties cost incredibly little.


Cutting Motor



Commercial robot lawn mower cutting motors range in power from around 25W to around 100W, and not many details are provided aside from this. The goal would be to find a high KV motor which won’t heat up after continued use. BLDC immediately comes to mind (similar to what is used in multirotor aircraft). An inexpensive BLDC motor can be around $15, and the same for the corresponding ESC.



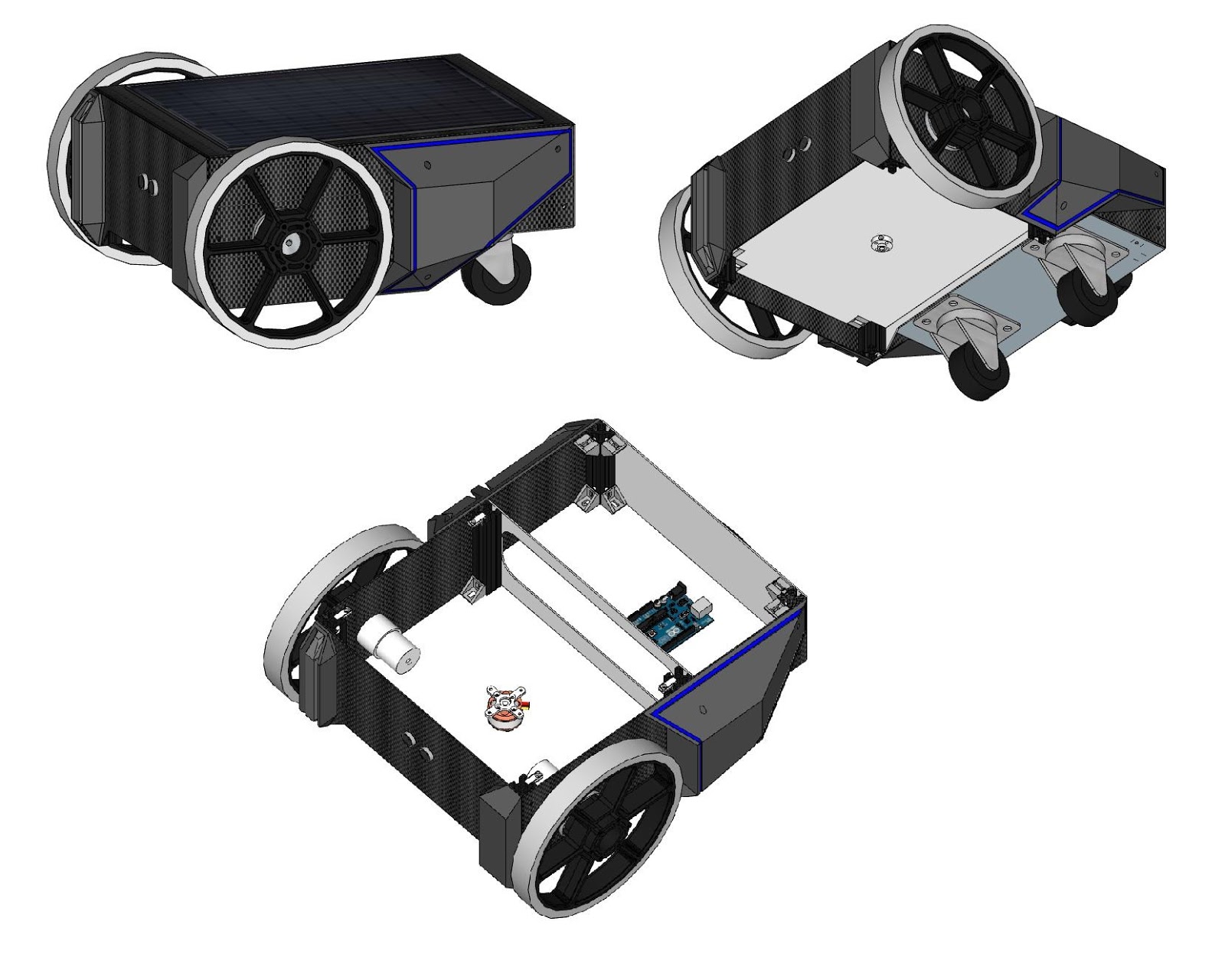
Frame



Injection molded ABS plastic seems to be the #1 choice for commercial / domestic robot lawn mowers. The frames are enclosed for protection against light to moderate rain, dust and grass clippings. The cutter is always semi enclosed. The wheels which drive the robot are normally also injection-molded and rarely have rubber, preferring instead a deep tread pattern for better grip. Since the robot moves slowly, most manufacturers do not use any form of suspension. Idler wheels also tend to be simple plastic to avoid having grass entering and restricting motion.
The frame we chose was not intended to be the most aesthetic, but rather the most reproducible. Panels are mostly rectangular with very simple cuts and drilled holes so all you really need is a saw and a drill. The frame is made using inexpensive 20mm x 20mm aluminum extrusions and corresponding hardware. The plate holding the cutting motor would be manually adjustable for different cut heights.
Power Options



Power for the robot would have to come from onboard batteries. Given the anticipated price, more “exotic” options like solar and a charging base would need to be set aside. Since a high current BLDC motor was selected, and the overall robot weight needed to be kept low, a LiPo battery seemed the logical choice. The only question would be choosing an appropriate capacity.
High storage capacity vs weight
High discharge current
11.1V charged is essentially 12V (perfect for the motors selected)
Microcontroller



Since the robotic mower would not have any advanced features, a normal microcontroller should be sufficient for interfacing with the sensors, motor controllers and generally managing the robot’s actions. Given Arduino’s current popularity, an inexpensive shield compatible Arduino microcontroller seems best.
Motor controller



Since a shield compatible microcontroller was chosen, a motor controller shield capable of up to 2A seems best. Note that all three motors have a stall current <4A, which means the continuous current should not exceed 2A. This is not to say that other DC motor controllers cannot be considered, but when it comes to wiring and available code (Arduino compatible), this seems like a good choice.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/project-robokut-mechanics-electronics
