

Project Robokut - (1) Design Overview
Project Robokut - (2) Sensor Selection
Project Robokut - (3) Mechanics & Electronics
Project Robokut - (4) Programming (Coming Soon)
Project Robokut - (5) BOMaterials
Background
Why do people choose to live in condos? Most people say that maintaining a house (inside and out) takes way too much time and effort, and when probed for details, mowing / maintaining the lawn almost always comes up as a task they don't want to do. When it comes to "menial tasks", mowing the lawn is right up there with vacuuming, washing dishes, cleaning up after their pets and pool cleaning - they need to get done, but not many people enjoy doing them.

birthedintofatherhood.com/2014/04/11/lawnmower-man/
Companies like Robomow, Gardena and others are working hard to release ever more affordable and versatile commercial robot lawn mowers. These work quite well, and they are available for different budgets and lawn sizes. However, for those who are not up to the investment, there are no real options (yet). For others who want to create their own robot lawn mower, what information is available and what does it take?






We've searched the web and although there are many DIY robot lawn mowers out there, projects like the popular Ardumower tend to be quite expensive, Make's Lawnbott 400 project is intended to cannibalize an existing mower and requires welding, and other projects often shown only the finished result or leave you guessing as to what was actually done. We'll democratize some of the tech used in robot lawn mowers and keep the end project affordable while at the same time ensuring you can follow the steps described in order to create your own functional DIY robotic lawn mower.



Project Robokut sets out to create the foundation of an inexpensive (ideally <$300 USD) DIY robot lawn mower which can be easily reproduced and improved upon by others. The objective is not to create a “one off” project but rather provide enough information so the reader is tempted to create their own variant and improve upon the design (and even fill in some missing information).
Configuration
Almost all existing robot lawn mowers for households use two drive wheels with one or two caster wheels. Exceptions include the LawnBott Spyder LB1200 which has two pairs of overlapping wheels, as well as more industrial lawn mowers which may use tank tracks, or a combination of tracks and wheels. Possible (basic) designs include:
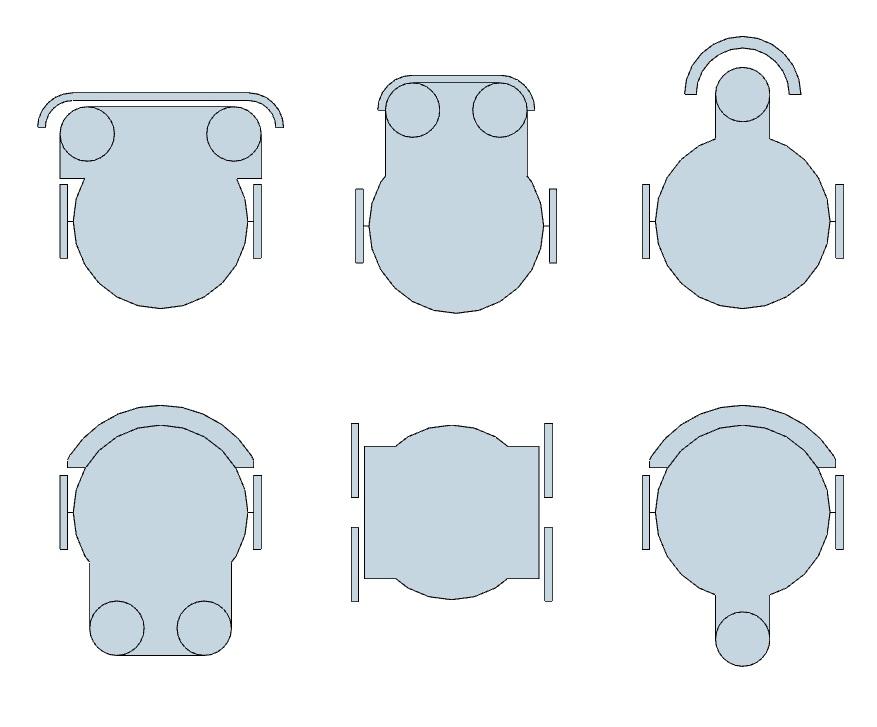
The design at the top left is one of the most commonly used on commercial robotic lawn mower: 2WD with casters at the front, and contact switches (“bump sensors”). The idler wheels protrude to the sides of the cutting area in order to maximize the cutting radius. The casters are located at the front to try to prevent them from getting clogged with grass clippings. The design at the top middle is a variation on this design where the idler wheels are mounted in front of the drive wheels and cutting area. The last design at the top uses only one caster rather than two, and the caster is at the front of the robot. Having only three wheels ensures they all have contact with the ground.
The first robot in the second row places the casters at the rear, while the middle design uses four wheels and no casters. Not many commercial robot lawn mowers use the four wheel design since lawns are rarely even (one wheel is often in the air), and the cost increases when using four rather than two motors. The last design has the caster / trailing wheel at the rear of the robot.
There are advantages and disadvantages to each design. The simplest design seems to be a two wheel drive system with one caster. Since the caster tends to be smaller than the drive wheels, we will mount it at the rear, despite most commercial robot lawn mowers mounting them at the front. The larger front wheels will act as a bumper. Although the final design selected for Robokut uses two caster wheels, it would work just as well with only one.
Existing Mower Tech
A non-exhaustive list of the more common sensors found in robot lawn mowers:
Battery voltage monitoring
Perimeter wire detection
Lift sensor
Tilt sensor
Rain sensor
IMU (or combinations of compass, gyro, accelerometer)
Alarm
Current sensors (for drive motors)
Base station “detection”
Since the choice of sensors is very important, the next article in this series will focus on sensor selection. Additional features found in some of the commercial lawn mowers include:
Additional Features
Docking / charging station
Variable cutting height
Rainproof
Child lock
SMS feature
Dog fence ccompatible
Timer
In the next article, we'll take a closer look at sensors. We invite you to comment below this post to give your feedback about the project, experiences you may have had building a robotic lawn mower or even features / information you might be looking for.
Links
Some commercial lawn mower manufacturers
- https://www.robotshop.com/en/worx.html
- https://www.robotshop.com/en/robomow-en.html
- https://www.robotshop.com/ca/en/gardena-canada.html
- https://www.robotshop.com/eu/en/ezicom-fr.html
- https://www.robotshop.com/en/remote-mowers.html
Some DIY Robot Mower Projects
- https://www.robotshop.com/letsmakerobots/lawna-a-robotic-lawnmower
- https://www.robotshop.com/letsmakerobots/rc-lawnmower-controlled-android-phone
- ardumower.de/index.php/en/
- makezine.com/projects/lawnbot400/
- instructables.com/id/Remote-Controlled-Lawnmower/
- open-electronics.org/a-robotic-lawn-mowers-powered-by-solar-energy-with-an-arduino-heart/
- hackaday.io/project/1797-autocut
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/project-robokut-design-overview