

Hi,
I have a Quadrino Nano controller connected with an ESC BLHeli_32 (model “ESC 4en1 KM55 BLHeli_32 20x20 - Skystars”). Before, I managed to make the motors work, but I had not done their calibration, so I applied the procedure which consists in connecting each ESC to the throttle command of the receiver. It seemed to work, and each motor was working correctly when I connected its ESC directly to the throttle output of the receiver.
The problem is that when the ESC inputs are connected to the Lynxmotion flight controller outputs, now it does not work. I have redone the complete process of configuration with the “Quadrino Firmware Config Tool”, even the ESC calibration procedure by doing a modification of the “Config.h” file, but nothing happens: the motors don’t move.
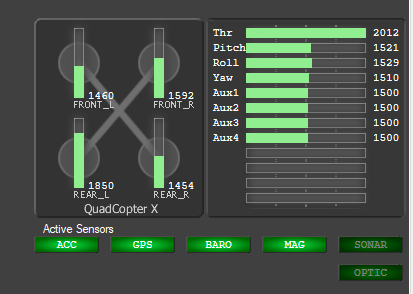
In fact, in the WinGUI interface, it seems that everything is okay, since when I increase the throttle, the output signals increase also (see the attached picture). So, what I understand is that, either the output signals displayed are not coherent with what is really sent, either the signals sent don’t have the right format for the ESC…
I really need help because I don’t know what to do now…
Thank you in advance!
Hi Combas,
Usually when ESCs are powered they will make a sound and then another sound to confirm they are armed.
ESCs won’t arm unless they see a LOW signal from whatever it control them, to avoid any motor starting when it could be dangerous.
There is a setting to change in the Config Tool to adjust the LOW value and that could be your issue.
Try the ESCs directly on the Receiver and note the sounds you are hearing, and then compare to what you have when connected to the Quadrino Nano.
Here is the setting: Min Command

Note that it could also be a bad calibration
Let me know,
2 Likes
Indeed, it was a problem of “Min Command”: I changed its value from 1000 to 900 and it worked.
Thank you very much for your help!
3 Likes
Great…!!! ![]()
1 Like