

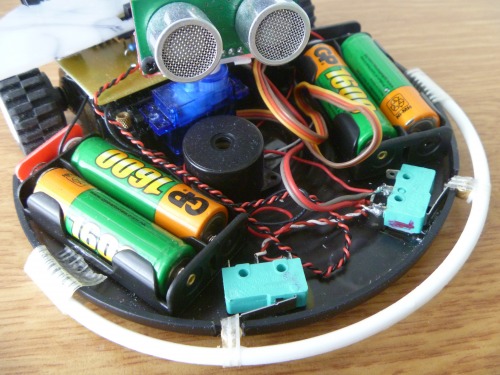
This is the third version of Primo. It has ultrasound sensor and bumper. I used my Aperia Arc S like webcam .

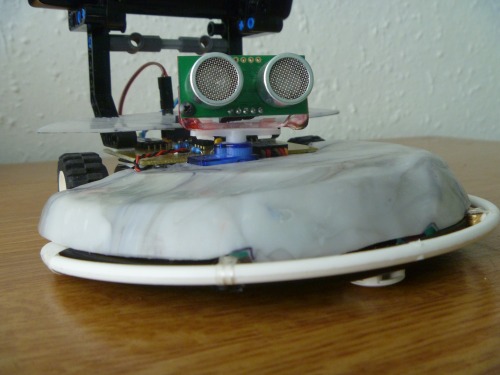

Navigate around via ultrasound
- Actuators / output devices: 2x servos
- Control method: Autonomus
- CPU: picaxe 08M
- Operating system: Picaxe basic
- Power source: 4 AA cells
- Programming language: Picaxe basic
- Sensors / input devices: 2 Bumper switches, SFR05 Ultra Sound
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/primo-s2000