Hi,
I am building a project which will run on battery power and am seeking advice on what specific supplies I should use.
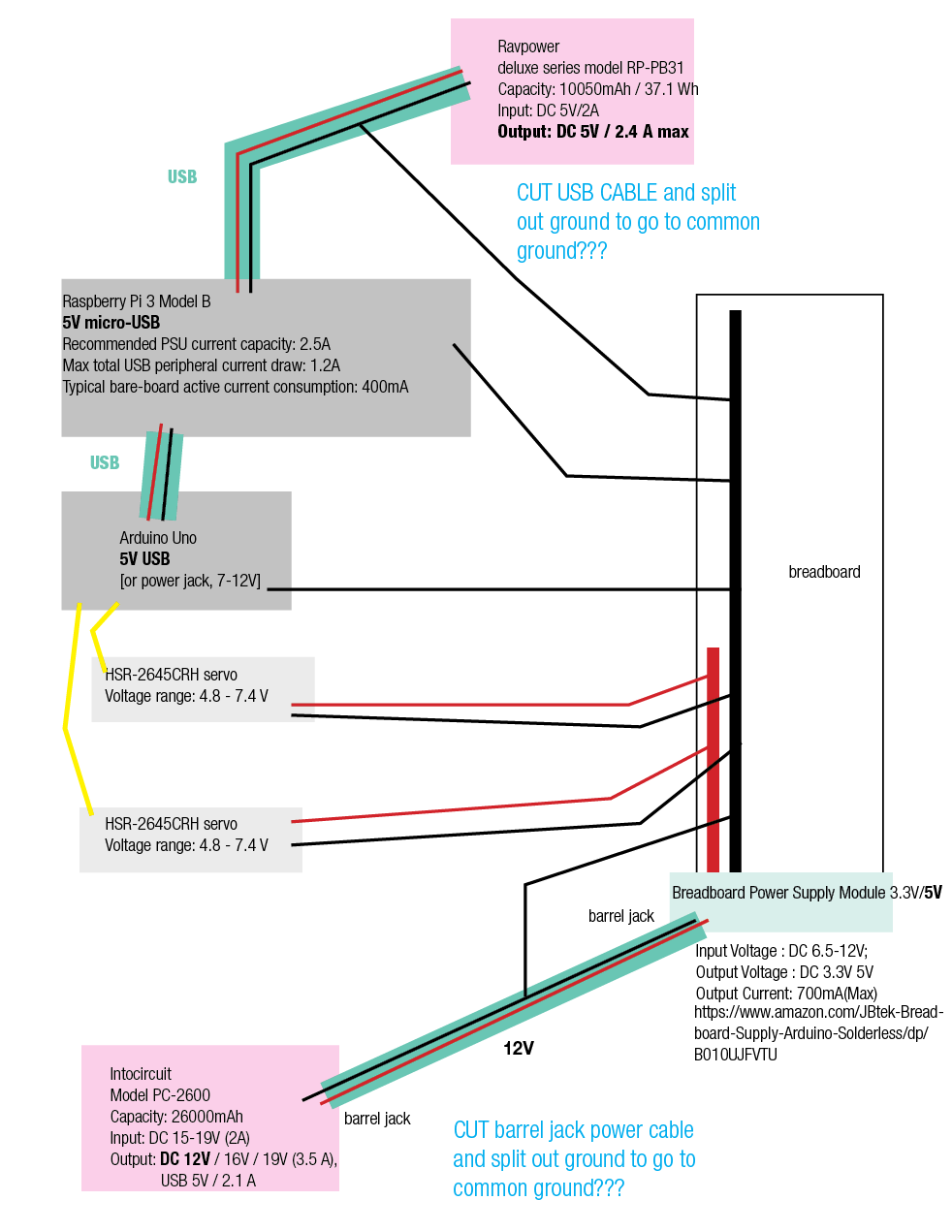
The project uses:
–Raspberry Pi 3 Model B
5V micro-USB
Recommended PSU current capacity: 2.5A
Max total USB peripheral current draw: 1.2A
Typical bare-board active current consumption: 400mA
which runs an
–Arduino Uno
5V USB
[or power jack, 7-12V]
which in turn runs
TWO servos
—HSR-2645CRH servo
Voltage range: 4.8 - 7.4 V
I am new to electronics but have the advice that the servos should be on a separate power source than the pi and the arduino, and that all parts (pi, arduino, servos, two batteries) should all have a common ground.
Do you have advice on what I should use to power this system? I would like it to run as long as possible–hopefully at least 6 hours and optimally 12 or more hours.
Thanks in advance!
Unfortunately there’s no “5V” battery, so you’ll need to choose either a 6V NiMh, or a 7.4B LiPo and use a step-down regulator.
Since the servos can be powered at 7.4V directly, no regulator is needed there.
robotshop.com/en/power-regulators.html
Be sure to find a voltage regulator which can accept 7.4V and output 5V at ~2A continuous (powering the Pi and the Arduino).
This can be a step down or “universal” regulator. The Pi would then power the Arduino via USB.
There are quite a few products which do this, so take a look at the offering in that category.
You would split the battery - one goes to power the servos while the other power the voltage regulator.
THANKS!
So now I have this idea of how to make the common ground from the battery supplies–but it is kludg-y and I’m not sure if this approach creates a problem.
That is: is there a reason why I shouldn’t modify the cables coming from the battery supplies to split the grounds and attach the ground also to the common ground? Diagram below, questions in blue. It seems this way the pi and the arduino are on one power source and the servos on another, and everything is to the same ground.
I would like to do it this way as I can set it up to swap in new battery supply bricks pretty easily and keep the system running (almost) continuously for the time I’d like.
(image link: dropbox.com/s/sblkqqkorr33j … 4.PNG?dl=0 )
A breadboard for that current is not the best.
Don’t modify the original cables coming from the battery - create an add-on Y-harness.
Using a USB breakout is easier (two examples):
robotshop.com/en/microb-usb … board.html
robotshop.com/en/cytron-usb … board.html
Do you want to aim for one battery or two?


{kind=link}