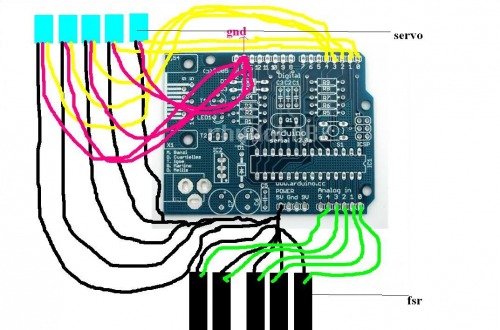
i have posted the wiring diagram
#include <Servo.h>
Servo servoMotor;
Servo servoMotor1;
Servo servoMotor2;
Servo servoMotor3;
Servo servoMotor4;
int analogPin = 0; // finger 1
int analogValue = 0;
int servoPin = 2;
int analogPin2 = 1; //finger 2
int analogValue2 = 0;
int servoPin2 = 3;
int analogPin3 = 2; //finger 3
int analogValue3 = 0;
int servoPin3 = 4;
int analogPin4 = 3; //finger 4
int analogValue4 = 0;
int servoPin4 = 5;
int analogPin5 = 4;
int analogValue5 = 0;
int servoPin5 = 2;
void setup() {
servoMotor.attach(servoPin);
servoMotor1.attach(servoPin1);
servoMotor2.attach(servoPin2);
servoMotor3.attach(servoPin3);
servoMotor4.attach(servoPin4);
}
void loop()
{
analogValue = analogRead(analogPin);
analogValue = map(analogValue, 0, 1023, 0, 179);
servoMotor.write(analogValue);
delay(15);
analogValue2 = analogRead(analogPin2);
analogValue2 = map(analogValue2, 0, 1023, 0, 179);
servoMotor1.write(analogValue2);
delay(15);
analogValue3 = analogRead(analogPin3);
analogValue3 = map(analogValue3, 0, 1023, 0, 179);
servoMotor2.write(analogValue3);
delay(15);
analogValue4 = analogRead(analogPin4);
analogValue4 = map(analogValue4, 0, 1023, 0, 179);
servoMotor3.write(analogValue4);
delay(15);
analogValue5 = analogRead(analogPin5);
analogValue5 = map(analogValue5, 0, 1023, 0, 179);
servoMotor4.write(analogValue4);
delay(15);
}
dats the programand wiring