Hi;
I have been posting elswhere about building some low cost Avoidance Bots for a school robotics club. We have been using these L298N motor drivers but advice on here is that although they are handy and cheap the voltage drop is significant.
The motors are similiar to these.
Birdmun is this post suggested using these L9110S motor drivers, I have a couple mor kits to put together and was going to use L9110S's for these last couple of kits.
The L9110S does not offer the additional +5v out which we were using to power the Nano, we have also experienced a problem (probably power shortage) when the servo is attached)
The power plan for the whole bot was going to be 4 x AA NiMh (4.8v) rechargeable batteries using the 4 x AA battery pack that came with the chassis, I also bought some PP3 connectors.
Can anyone help with the (cheapest / best value for money) power plan for both types of Bot (one using the L298N and one using the L9110S) also with the option of hard mounting the sensor instead (i.e. omitting the servo), the only reason I suggest this is to keep the battery costs down for the kids building these kits.
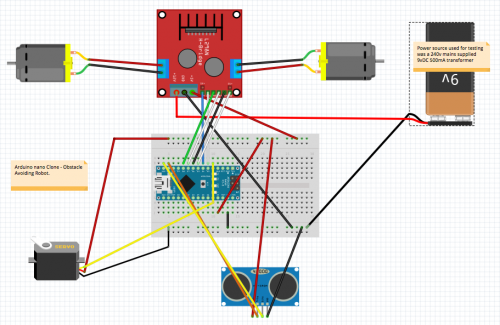
Parts and diagram of existing bot is below for info.
The parts are:
2 x DC Motors (Linked above)
1 x Nano ATMega328 (Arduino Clone)
1 x HC-SR04 Ultrasonic Detector
1 x 9g Micro Servo
L298Nor L9110S
The sensor will be mounted on the servo, the 9v shown in the diagram is simpy to show a power source, please don't reply state 9v batteries are crud as I have been told this already - message received and understood :-)
Did the old motor driver work well?
If the old driver worked well, even with its inefficiencies, then I would still use the old one. As long as you’re using rechargable batteries, then ask them to make sure the batteries are fully charged before club meetings.
If you’re going to power
If you’re going to power both the motors and the nano from one supply, you should use five or six NiMH batteries in parallel to proved power (with a low drop-out linear regulator for the electronics if the Nano doesn’t do that).
At four batteries (4.8v nominal) once you start the motors, they may take enough from the power supply to temporarily lower the voltage to the electronics such that the Nano might reset.
If the motors can’t take above 6v, The 2v dropout from the L298N should be enough to keep the motors safe. Or you could lower the max PWM that you use.
Battery connection
I beleive you meant series (not parallel) to get approx 6.5V.
**Correct, I meant series.
I**
Correct, I meant series.
I thought that each battery is 1.2v nominal, so 5 should get 6v and 6 should have 7.2v. Or are you talking fully charged?
One other possibility for a battery would be a 2S LiPo, with 7.2v nominal.
OK for the club robots we
OK for the club robots we will use 6 x 1.2 NiMh Batteries as suggested above, but for reasons of future proofing on my version I have purchased a 3S 11.1v Lipo Battery.
My plan is to run the 11.1v Lipo + supply to the L298N Motor Driver +12v In via a SPST switch.
The Nano will be powered from the +5v from the L298N Motor Driver as shown in my diagram.
I need a little more advice on the power for the Servo and the HCSR04 Sensor, the 9g Tower Pro Servo takes 4.2 - 6v and the HCSR04 takes 4.5 - 5.5v.
Would it be OK to run the Servo and the HCSR04 from the same 5v supply as the Nano or should I use a separate 5v regulator for the Servo and take the feed from the Battery.
Ok so folliwng the advice in
Ok so folliwng the advice in this thread and from these forums I have now bought a 7.4v and an 11.1v Turnigy LiPo rechargeable batteries (different voltages to be used in different applications).
Looking at the component layout I provided above I need some help with the wiring and how to supply power correctly for all of the components .
The 9g Tower Pro Servo takes 4.2 - 6v and the HCSR04 takes 4.5 - 5.5v.
I guess the SPST switch should be placed on the battery V+ but should I power the Nano and the L298N drirectly from the SPST and then run the Servo and the Sensor either from the L298N +5v output or use a separate 5v regulator IC.
Where should I put any Capacitors for Noise?
Sorry about my lack of knowledge but I am trying to learn and I am following social constructavists learning theories we learn from a more knowledgable other :-)


