I'm doing a work to university.
I need to study diferents techniques of robot position. I have done 3
beacons triangulation with sucess, 2 beacons and compass with sucess,
encoder with compass it's ok too, and now I'm working on accelerometer and
compass.
The accelerometer gives me the x and y acceleration of the bot and the
bearing from the compass! with this I need to calculate de velocity, after,
calculate de position (Integrations process)! And then I need to include
the position on the referential.
anyone ty this?
best regads
daniboyBOT
Yes I will finish this work
Yes I will finish this work between september and dezember!
When I’ve done, I Post everything!
I can see my bot pictures! And soon I will post some videos!
best Regards
DaniboyBOT
I am guessing if you are this far along in your education.
You have had physics. My take is you just need to accelerate slowly so that the accelerometer is always giving a reading. Once you can get a constant reading from your accelerometer you should(?) be able to do the necessary calculations to move from point A to point B. It will be much less accurate without knowing the wheels are moving, but, it is the best idea I can come up with.
about the referential
okay
Thanks for the good explanation. about the code, I’ll use an Arduino Mega, so I do not quite know how I can do an integral, because I never saw any role for this purpose. but if I understand it only need to SUM vel + accel * dt (dt is the time between SAMPLES)
As for the calculations is quite right with what I already googled and with how I’m trying to put into practice.
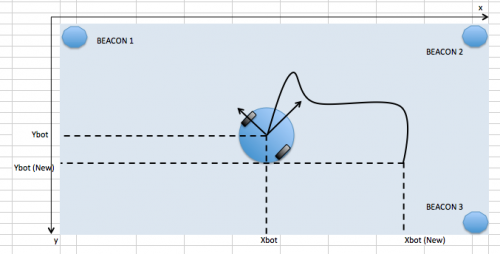
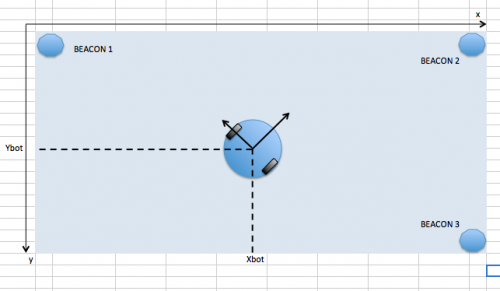
As for the referential I mentioned, this is the arena where the robot will navigate. You can see on the picture.
This is my bot used to this work. https://www.robotshop.com/letsmakerobots/node/34836
Best Regards
DaniboyBOT
When I say referential i
When I say referential i mean that I need to know my real position on the arena.
I think my calculated position is in reference to the bot referencial (xy).
Maybe showing it on a computer screen and showing your bot’s location? I don’t understand.
You said that it’s a good idea to do a small table of pre-calculated sine/cosine values ( using one table for 0 to 90 degrees and by symmetry usig it for 0 to 360 and sin and cosine. ) but It will depend of the angle! and it can be anything I think!
As you can se on the image The bearing change acording to the position. Do you have any Idea?