Hi,
I have a question regading the “Pololu TB67S128FTG” stepper driver (Pololu TB67S128FTG Schrittmotortreiber - RobotShop). In the datasheet of the IC it is written that it is capable of 5A at maximum. Would it than be possible to use the “Pololu TB67S128FTG” board with asufficient cooler (+maybe forced air flow) to drive a phase current of 3 A? That would still be less than the recommended 70% of maximum (5 A * 0.7=3.5 A) given in Note 1 on page 39 of the datasheet.
Does anyone have experience with this. Can I use the built in potentiometer to set a current of 3A?
I am looking forward to your answers.
Best,
Robusto
Hello @Robusto and welcome to the RobotShop community,
You can learn how to properly set the current limit of your Pololu stepper motor driver carrier by following the steps in this video:
The TB67S128FTG supports such active current limiting, and the trimmer potentiometer on the board can be used to set the current limit.
You will typically want to set the driver’s current limit to be at or below the current rating of your stepper motor. One way to set the current limit is to put the driver into full-step mode and to measure the current running through a single motor coil without clocking the STEP input. The measured current will be equal to the current limit (since both coils are always on and limited to 100% of the current limit setting in full-step mode).
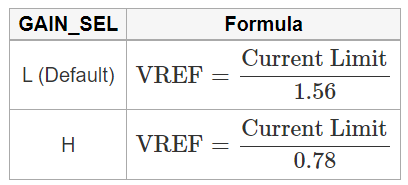
Another way to set the current limit is to measure the VREF voltage and calculate the resulting current limit. The VREF voltage is accessible on the VREF pin. The driver’s RS_SEL and GAIN_SEL pins are pulled low by default, selecting internal current sensing. If the GAIN_SEL pin is high, the VREF gain (multiplier) is reduced by half. The current limit in Amps relate to VREF in Volts as follows:
The TB67S128FTG driver IC has a maximum current rating of 5 A per coil, but the actual current you can deliver depends on how well you can keep the IC cool. The carrier’s printed circuit board is designed to draw heat out of the IC, but to supply more than the specified continuous current per coil, a heat sink or other cooling method is required.
Please note that the coil current is a function of the set current limit, but it does not necessarily equal the current limit setting as the actual current through each coil changes with each microstep and can be further reduced if Active Gain Control is active.
The TB67S128FTG has a feature called Active Gain Control, or AGC, that automatically optimizes the motor current by sensing the load torque applied to the motor and dynamically reducing the current below the full amount. This allows it to minimize power consumption and heat generation when the motor is lightly loaded, but if the driver senses an increased load, it will quickly ramp the current back up to the full amount to try to prevent a stall.
I hope this information can help you out
1 Like




 Technology")