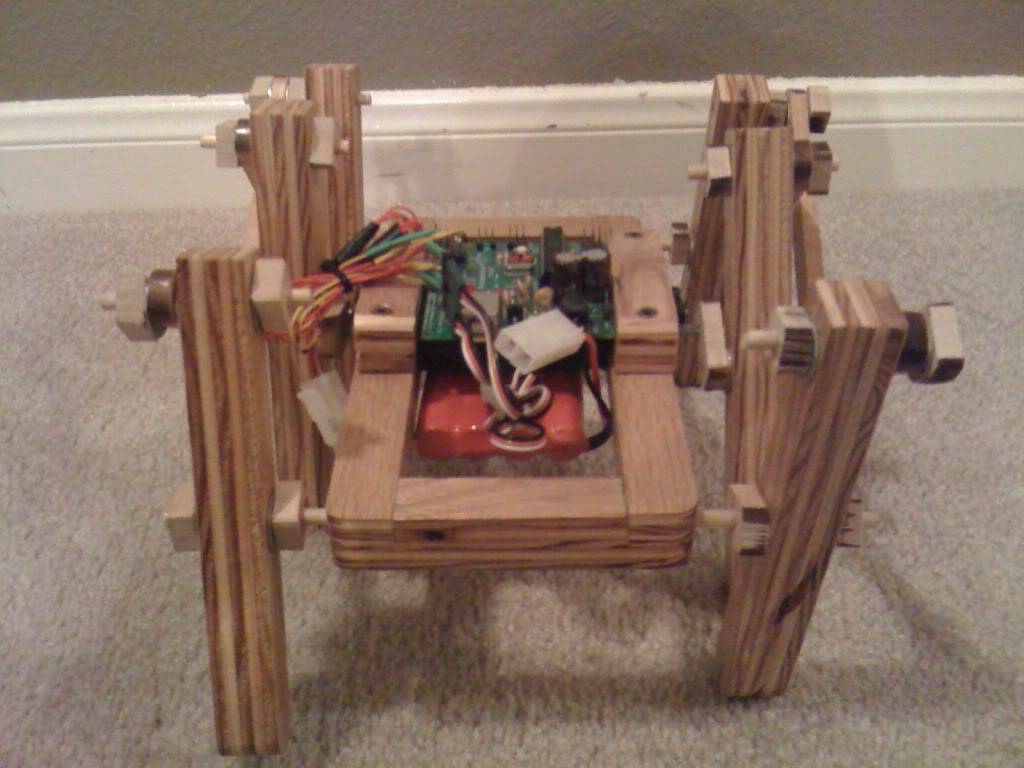
This is not the first robot I have built. I built it one weekend when I was unable to use my computer (so I was bored), and just using parts I had at my house.
Most of the parts are made of white oak venieer plywood, and then stained and urithaned. The motors are VEX motors, which are just like a servo modified for contineuous rotation.
It uses a computer and a Robodino for control (Roboduino is just like arduino except it has pins spaced for servos and such). The computer sends a signal to the robot through usb from a keyboard input and that controls the walking.
This weekend I got my camera out to make a video, but when I turned the robot on it was not acting correctly at all. It did not matter what value I set to the servos they would always spin, and I have not found how to fix it yet, but I will go through and make sure that none of the wires have changed. As soon as the problem is fixed I’ll make videos.
Several years ago I have built a similar robot using a Lego Spybot and programmed it to go forward until an object was found, then fire it’s laser trying to destroy the object and if that wasn’t successful, back up and turn away. It was really fun to watch, perhaps I still have a video of it somewhere… I’ll edit this post if I can find it!
I guess you can use lollipop sticks for the legs and just a piece of plywood for the chassis. Any microcontroller and 2 CR motors will do. Simple and fun to watch!