


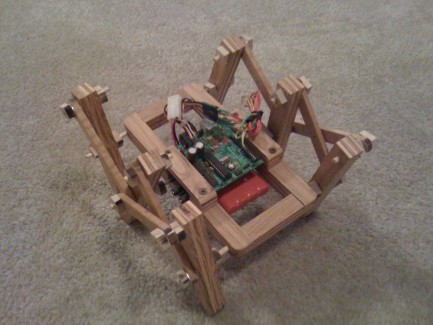
Plywood Hexapod
This is not the first robot I have built. I built it one weekend when I was unable to use my computer (so I was bored), and just using parts I had at my house.
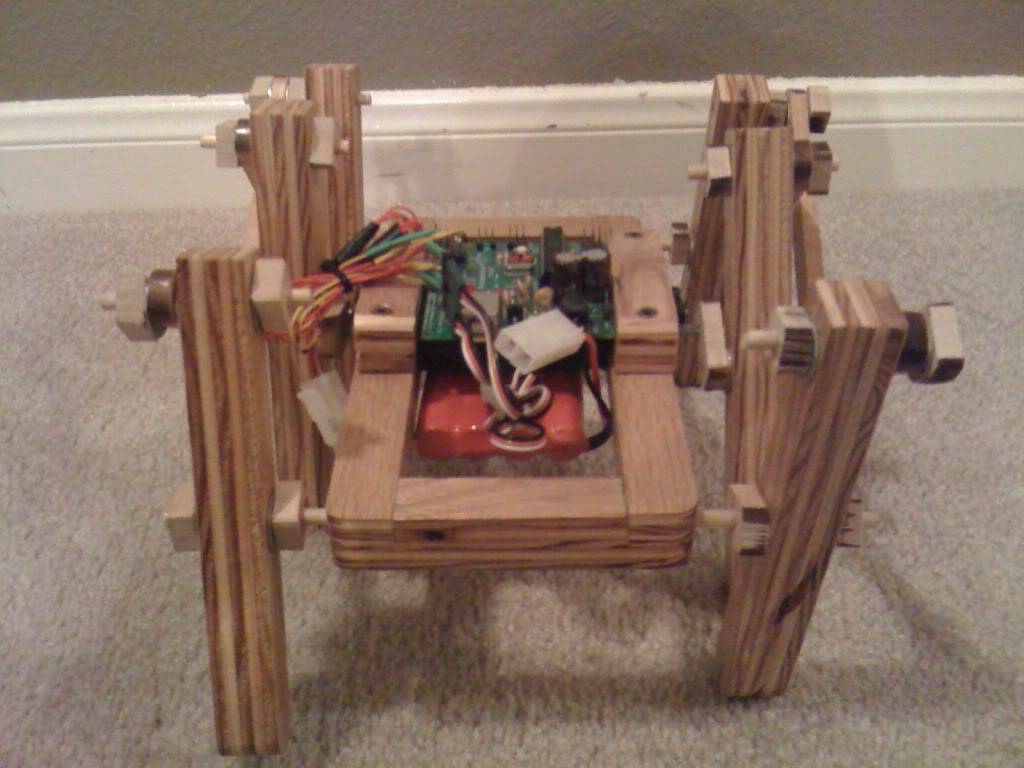
Most of the parts are made of white oak venieer plywood, and then stained and urithaned. The motors are VEX motors, which are just like a servo modified for contineuous rotation.
It uses a computer and a Robodino for control (Roboduino is just like arduino except it has pins spaced for servos and such). The computer sends a signal to the robot through usb from a keyboard input and that controls the walking.

Ive been busy working on another robot this weekend, but I will try to get a few videos up soon.
- Actuators / output devices: 2 Vex motors
- Control method: Computer and Arduino
- Power source: 9.6V 800mHr