

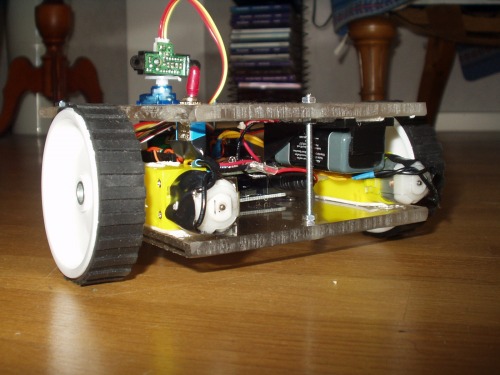
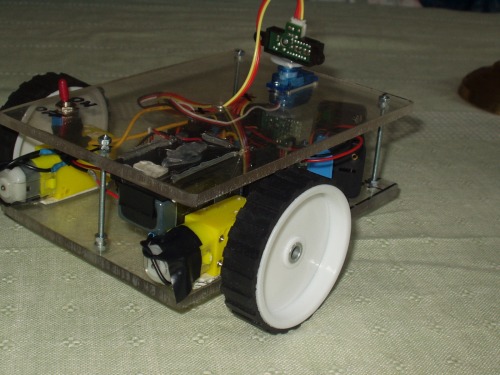
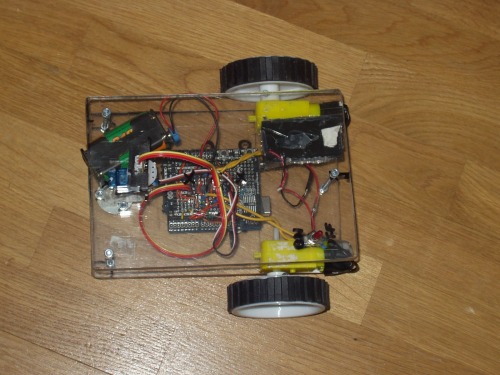
This is my first robot that I made with an Arduino. It's made of two pieces of plexiglas. The upper piece stands on 3 threaded rods. The motors are attached with hot glue and the IR sensor is also glued with hot glue on the servo. The robot works very well now and it was very fun to make it. I have also put a small camera on the robot. In the future I will maybe change the code in the robot so it will follow instead. I will also change the sensor to an ultrasonic sensor.
update 1
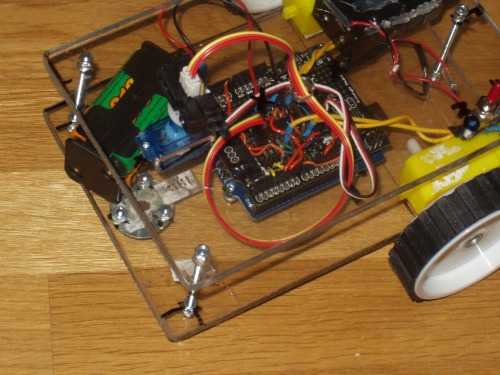
So I have been experimenting and I made a new code for the robot. So now the robot will look left and right when it's running that will make so the robot would not get stuck. The new code looks very messy so I need to make some adjustments. I have recently put a button on the robot. That button I will use latter so I can change the mode on the robot. Such as follow or avoid and also follow a line.
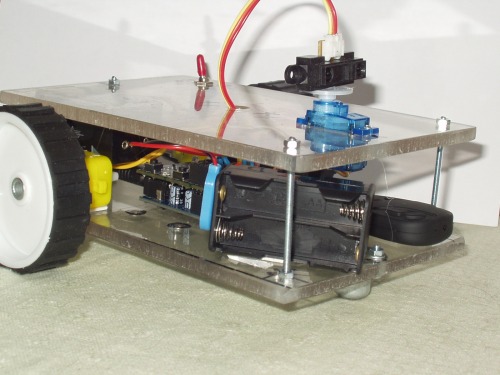
Navigating with IR and looks for the best way.
- Actuators / output devices: 2 geared motors and one servo
- Control method: autonomous
- CPU: Arduino duemilanove - ATmega328
- Operating system: windows XP
- Power source: 4 AA NiMH, 9v battery for the Arduino
- Programming language: Arduino Processing
- Sensors / input devices: Sharp IR GP2D12
- Target environment: indoor on smooth surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/plexiebot-my-first-robot