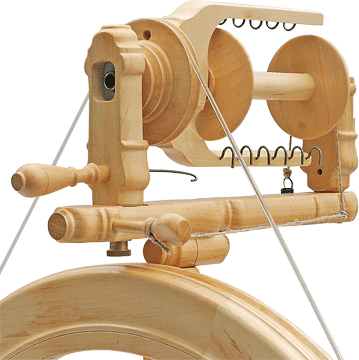
Looking for some help finding the correct motor for my project. I’m not building a robot. I’m building an electric spinning wheel. I am looking to build something similar to a hansen mini spinner (you can find pictures of one here ). I am looking at getting a Arduino uno but after that I’m stuck (I’m extremely beginner here). I’m not sure what size motor i need (and I can’t figure the rest out till I pick a motor) or whether to go brushless or not or what motor controller to get (if i supply power to the Arduino do i need to supply additional power to the motor controller?). The set up will essentially be a pulley style with the motor driving the flyer assembly. For those who have never seen a modern spinning wheel you can see a picture of my flyer here. It is normally connected to a 19in drive wheel using a poly drive band and the drive wheel is powered by foot peddles. I hope I am explaining this well and will be happy to provide more detail if i missed something
The flyer weighs about 6 oz but will have some drag from wind (and will get heavier as i work up to an extra 4 oz). Soft start, soft stop . I’m aiming for at least 1600 rpms at the top end of speed. with the flyer having 3 pulley sizes ranging from 3in to 1.5in. Can you help me find the correct components for my project? I know i need it to operate at multiple speeds and i need to be able to adjust the rotation on actual device. Which means i need a potentiometer right? I also need to be able to reverse the spin direction and from my research it looks like I need a DPDT switch to make that work.
So my parts list so far
Arduino Uno
a breadboard?
a motor controller
aDPDT switch
a potentiometer
the motor
a mounting hub?
a power supply for the arduino (comes with kit if i get kit)
A foot switch and what ever jack i need to make that work cant find on atm
Am I missing anything? Please help!
This is a very interesting video showing how the mechanism works:
youtube.com/watch?v=TK1deN_IXok
There are quite a few parts.
Not sure how to do the torque calculation, but it does not seem to require anything with very high torque.
You might try a variable gear motor such as:
robotshop.com/en/tamiya-plan … r-box.html
We offer some pulley ssytems here (rather than gears):
robotshop.com/en/tamiya-pull … =RB-Tam-46
If you choose an analog DC brushed motor controller, you can use a potentiometer input to control the speed.
Arduino Uno: yes
Breadboard: Not needed if you choose a shield-compatible motor controller.
A motor controller: yes
DPDT switch: Not really; you would use this as On/Off?
A potentiometer: yes; this would control both speed and direction
Motor: yes
A mounting hub: Likely
A power supply for the arduino (comes with kit if i get kit): Yes, and maybe one for the motor
A foot switch and what ever jack i need to make that work cant find on atm: the foot switch would replace the potentiomter
Thank you for the help! Sorry for the million questions i hope they arent stupid questions.
I like the look of that motor and i think its worth trying even to give me a sort of baseline. For power i would like to run everything off of one dc-in(wall-adapter and or battery for mobility). If the motor controller needs power how do i do that? I assumed i would just need plug a dc adapter into the arduino uno and then that would power the shield and the motor. Is that not the case?
Ok so for the switches. So my thinking was that i could use both a DPDT switch as the main power and to control direction which in theory would allow me to have more range on the potentiometer without the risk of turning it too far and ending up going the wrong direction. ON-reverse OFF ON-forward then use the potentiometer to control just the speed. Is that not do able? I’m going based of their build which has both.
My second question is the foot switch. That’s what i see used to control the soft start/break. Changing you speed rotation every time you need to stop would cause you to have consistency issues. Ideally you should be able to set your speed and your direction then be able to break without messing with either of those controls. With the press of a button you could slow the flyer fix an issue then press the switch again to resume spinning. It doesn’t need to be a foot switch but it needs to be easy to hand.
The power would really go to the motor controller and split off to the Arduino. The Arduino is normally not able to transfer much current via its IO pins whereas the motor controller is what needs the most current.
Motor controllers which accept analog input are really only used with one input device, not two. You’ll need the microcontroller for this, and provide a PWM signal.
You would need to program this - it’s not inherent in the motor controller.
Ok need a bit more help. I ordered the robotshop.com/en/tamiya-plan … r-box.html that you recommended previously. I currently have two 4:1 gear boxes on it but it is still struggling to turn the flyer. If i put another gear box on it then it will be too slow for my needs(its also unpleasantly loud). I think this means i need a bigger motor. Is there another motor you can recommend for my project?
Current set up is aduino uno with arduino motor shield powered buy a 9v wall wart via the uno’s dc adapter. The motor has a 30cm pulley but the pulley bands that came with robotshop.com/en/tamiya-pull … =RB-Tam-46 Keep snapping if i try to use the spinning wheel.
Can you make the spinner more lightweight? If not, then you do indeed need a more powerful motor.
Calculate the RPM of the motor with the current gear ratio (if that RPM meets your needs).
Next, add the additional gear ratio and see if the torque is sufficient; not caring about the RPM (and if so, calculate that value).
Knowing the RPM and torque will allow you to choose a replacement motor with these specs.
The motor’s RPM at max efficiency is around 8300 so simply divide this by the gear ratio.
The motor’s nominal torque would be around 25g-cm, so multiply this by the gear ratio.
Note that the motor you have operates best at 3-6V, and 9V is a bit high.
Instead of the rubber bands included as standard, can you get O-rings? Another option is to simply find stronger elastics.
Can you include a photo or two of the setup?


{kind=link}