

Hi all,
this is my latest project of an autonomous lamp, it is controlled by an Odroid computing the complex stuff like face recognition and the trajectory computation and an ATMega for generating the PWM signals for the servos.
I'm currently compiling an article for the ODROID magazine, so I cannot post the full text upfront, but I can give some basic information and a few more pictures.
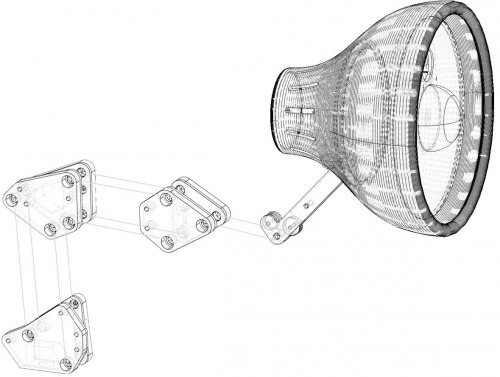
That is the CAD Design made with TurboCAD
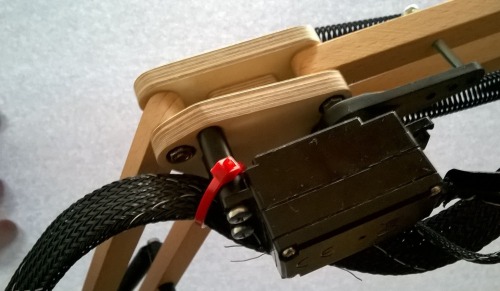
Some close-ups on the woodwork:


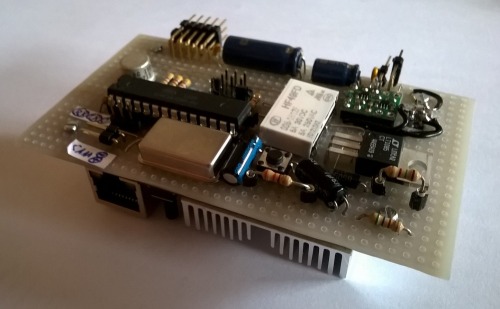
The control is done by an Odroid U3 and a self-made Arduino shield on top. The ATMega does the PWM output for the servos, switches the relay for the servos, and regulates the voltage for the servos with an external voltage regulator during startup in order to have a smooth movement to the initial position.
The parts I used are
· Odroid U3 running Ubuntu 14.04.02 with latest g++
· Software uses openCV 3.0 and Boost 1.57 as base libraries
· ATmega 328 running C++ firmware based on Arduino Library for Servos and I2C
· Servos from Hitec: 77B (for turning base & nicking the head), 7954SH (lower strut, strong & expensive), 7775MG (upper strut, also expensive), 5065MG (turn head inside the lampshade)
· 3D print of a TurboCAD model made of ABS
· Springs from my local dealer, 20 ball bearings, 0.5m2 multi-layered birch, and several brass axis
The software (especially the trajectory planning and face recognition) is described in the article to be published in the ODROID magazine, I will add a link once it is available.
Cheers
Jochen
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/pixar-robot-lamp
