

Pinkie bot
This is my first robot. It was built by the instructions found in this page: http://www.societyofrobots.com/step_by_step_robot.shtml. I used whatever I could find. The body is a nesquick box. I made the wheels from CDs, with some expanding polyurethane foam and rubber gloves for good traction. The gloves happened to be pink, hence the name. The motors are servos modified to rate continously. The contoller is an ATMega8. I choose the big wheels for the speed. The controller can be powered from the AA batteries or from a separate 9V battery (selectable by a jumper).
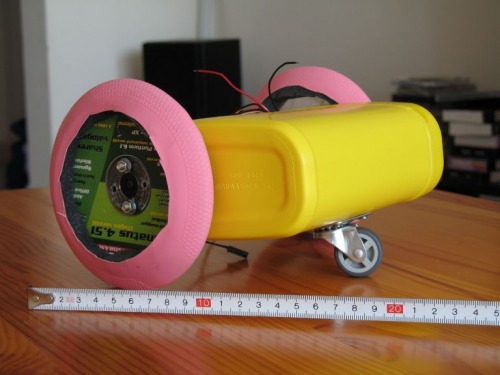
The nesquick box is very nice body.
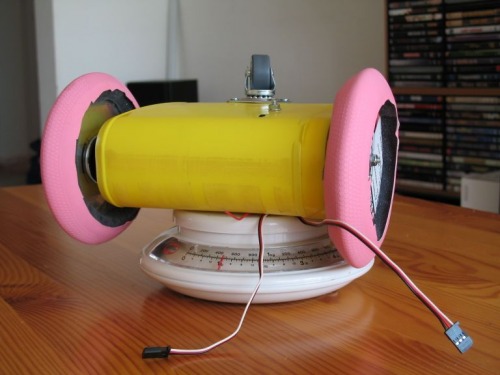
Shows the weight of the robot without the lectronics.
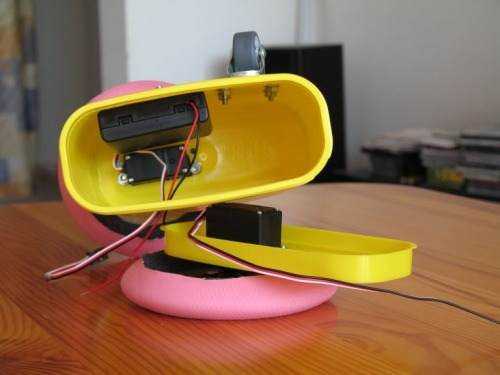
The inside. It is a bit hard to change batteries.
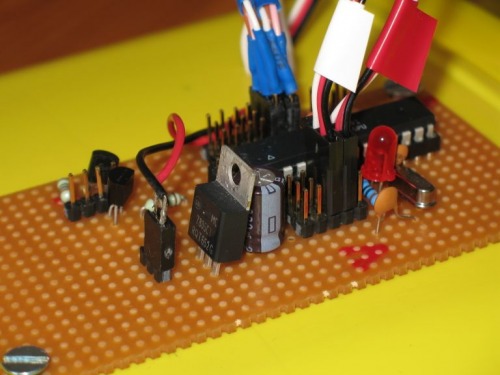
The electronic components on a breadboard. The serial port is a very simple (and cheap) solution.
Some later additions:
- Wheel encoders
- Ultrasonic range finders
- IR range finder on a servo
seeks light, avoid obstacles
- Actuators / output devices: 2x Continous Rotation servo's for wheels
- Control method: Microcontroller
- CPU: atMega8
- Power source: 4 AA batteries, one 9V battery for MCU
- Programming language: C
- Sensors / input devices: Photoresistors, ultrasonic rangefinders, ir rangefinder
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/pinkie-bot