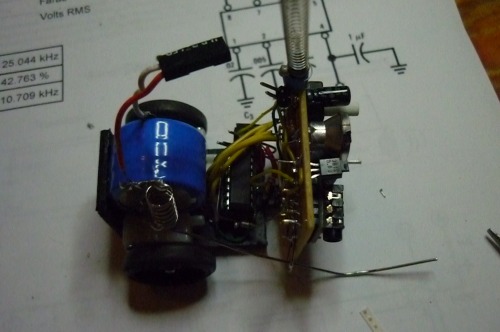
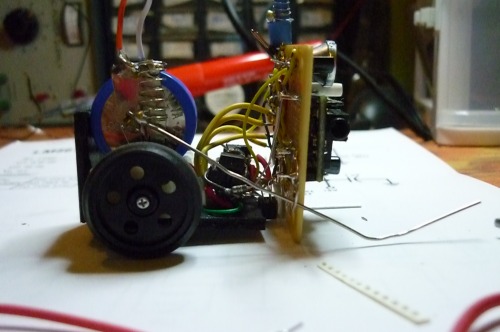
This robot normally goes around avoiding obstacles and (sometimes) edges until its batter drops low. Then the robot goes towards a 38khz pulse instead of away from eat, leading it to its charging station. The robot will have an rf transmitter within the next two weeks which transmits when its battery is low to the IR beacon, so it can turn on. The edge detector only works sometimes because the motors are too fast for the robot to respond and the sensor isnt mounted far enough to the front.
The video posted only shows the robot searching for its charging station, I will upload some other videos of it avoiding obstacles later on.
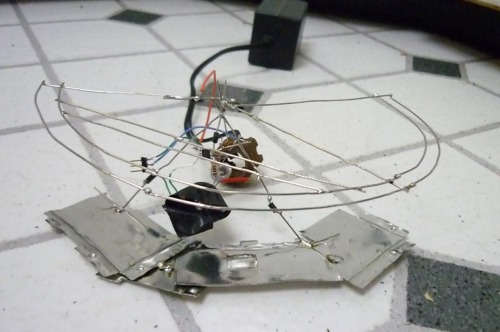
The charging station uses three IR leds and a picaxe o8 to generate the 38hz signal. The Picaxe o8 will also decode the RF receivers signal when I add that in. It is mostly made up of paperclips and some thin sheet metal salvaged from a VCR. The adapter used is a 5V adapter from an old telephone or answering machine. (I dont remember where I got it)
UPDATE:
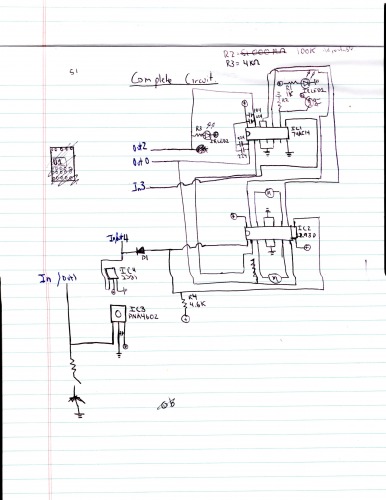
I have attached the code that I used, and here is a scanned drawing of the schematic for the version of the robot right now. The RF transmitter is not drawn in. Its kinda hard to see, so if you have any questions about it feel free to ask.
That wireless charger looks really neat for only 9.50. I bought the battery pack from solarbotics a while back, you could get them for 50 cents each. They still carry some like it, but in a different configuration I think.
I love the design/concept of this bot! VERY well put together, it looks like it runs like a charm! I hope your still working on this project, I know it’s a couple years old. I was actually designing my own beacon chasin’ bot when I came across this, I know it’s old but I have faith you can help me! Lol.
I can’t read your schematic too well so I can’t tell, how do you have your input1 and input4 set? Maybe you could upload a commented version of the obstacleavoidance code you got up if you wouldn’t mind? I see how your response to the IR signals from the beacon works, but I’m wondering what you did to get your object detection? For the fun of it I attempted to use your code with an 18M2 to see how well it works, and it just loops Start/Goback, I can’t figure out what you used for your input1? I can’t find any other people who have done this same simple concept and succeeded, and I been struggling to try to make an IR LED obstacle sensor for a while now. (I want a cheap alternative to the premade sensors/ultrasonic.)