



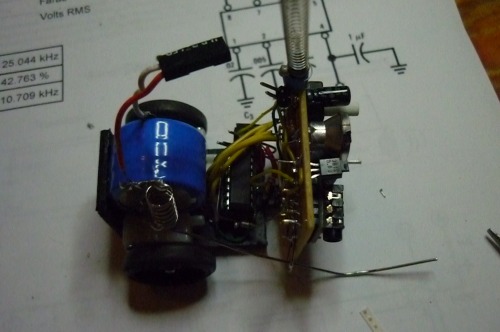
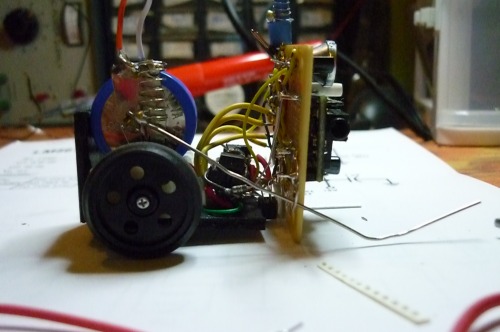
Picaxe 08 Charging Robot
This robot normally goes around avoiding obstacles and (sometimes) edges until its batter drops low. Then the robot goes towards a 38khz pulse instead of away from eat, leading it to its charging station. The robot will have an rf transmitter within the next two weeks which transmits when its battery is low to the IR beacon, so it can turn on. The edge detector only works sometimes because the motors are too fast for the robot to respond and the sensor isnt mounted far enough to the front.
The video posted only shows the robot searching for its charging station, I will upload some other videos of it avoiding obstacles later on.
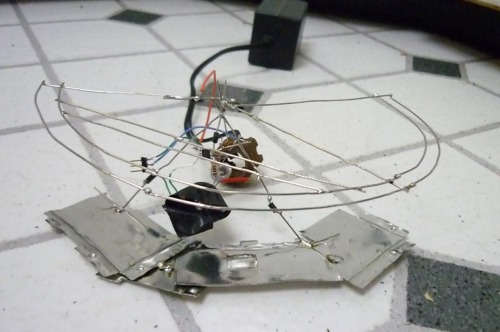
The charging station uses three IR leds and a picaxe o8 to generate the 38hz signal. The Picaxe o8 will also decode the RF receivers signal when I add that in. It is mostly made up of paperclips and some thin sheet metal salvaged from a VCR. The adapter used is a 5V adapter from an old telephone or answering machine. (I dont remember where I got it)
UPDATE:
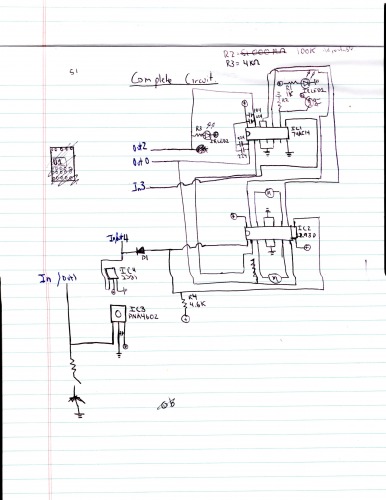
I have attached the code that I used, and here is a scanned drawing of the schematic for the version of the robot right now. The RF transmitter is not drawn in. Its kinda hard to see, so if you have any questions about it feel free to ask.
Avoid Obstacles, Search for charging station when battery is low.
- Actuators / output devices: 2x Solarbotics GM10
- Control method: Picaxe 08M
- CPU: picaxe 08M
- Power source: 3.6V Nicad
- Programming language: Basic
- Sensors / input devices: QRD1114, panasonic PNA4602, 1381 voltage trigger
- Target environment: indoor