

24/10/2013
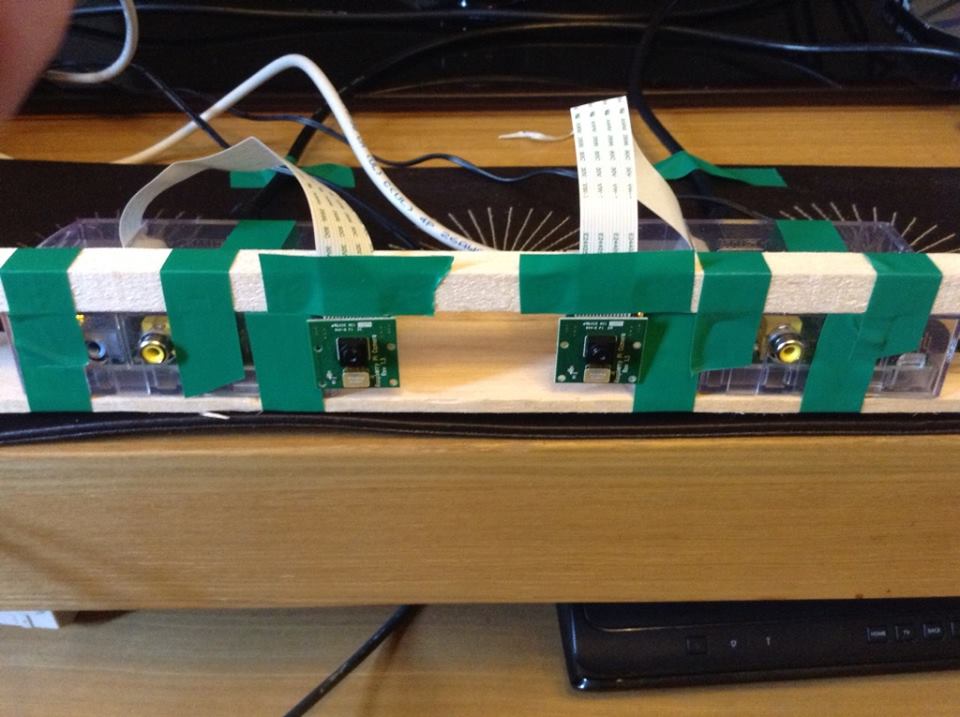
Latest update on my blog http://robotblogging.blogspot.co.uk/2013/10/pi-eyes-stage-2.html I've started work on getting raspberry pi data out of the camera modules and into opencv for processing. And also built a cute stereo pi cam rig :)
The beginning
I've started a new robot to experiment with the power of the raspberry pi. This'll be building on my earlier prototype of MmBot, with the primary intent of being like a cute robot pet. I'm going to town on cpu power, using multiple raspberry pis running in parallel and communicating over the network to attain 3d reconstruction of a scene in real time, sim-speak style audio feedback and some pretty sophisticated ai developed using my game programming background.
Should be a fun project, but to begin with I'm not actually messing with wires. I'm trying out a new approach (for myself) by writing a simulation of the robot in unity first. I'll get a load of the coding done, then once I have something half decent I'll get my 3d printing and soldering gloves on and start building!
Latest info is here:
http://robotblogging.blogspot.co.uk/2013/09/introducing-pibot.html
http://robotblogging.blogspot.co.uk/2013/09/pi-bot-simulator.html
http://robotblogging.blogspot.co.uk/2013/10/update-on-pi-bot-simulator.html
This little image from my blog shows the pi bot hardware layout
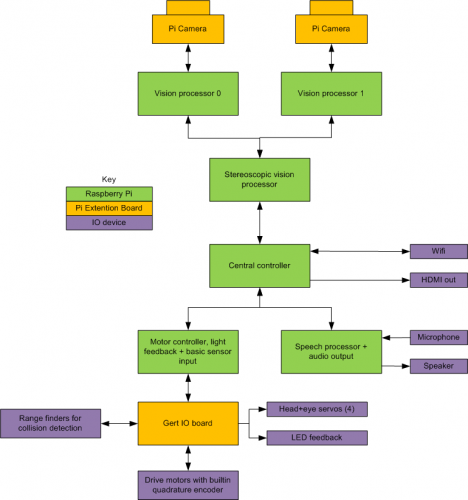
It's a pet robot!
- Actuators / output devices: 4 servos, 2 quadrature motors
- CPU: Raspberry Pi
- Operating system: Linux
- Power source: Big - probably licad battery pack
- Programming language: Python and C++
- Sensors / input devices: Sharp IR, 2 Pi cams
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/pi-bot