Ive built a small hexapod using MG90 servos and i would like to use a lynxmotion SSC-32 and botboarduino to control it using the phoenix code. Im actually looking for the proper code and some kind of step by step guide to configuring the firmware and stuff. Ive been looking at the arbotix code and can see that i need to change some numbers like the coxa length, femur length and ETC. But im sure theres a few more things that need to be changed. I also want to use my PS2 controller to operate it during off-line play.
The lynxmotion site makes out like everything is prewritten and that i just need to install the firmware but it looks like i might need to actually do some coding. IDK.
Any and all help appreciated.
Botboarduino PS2
Hi Duhjoker,
Take a look at this link to help you put SSC32 and BotBoarduino together with the PS2 controller.
And here is the code for the BotBoarduino to control it with the PS2 Controller.
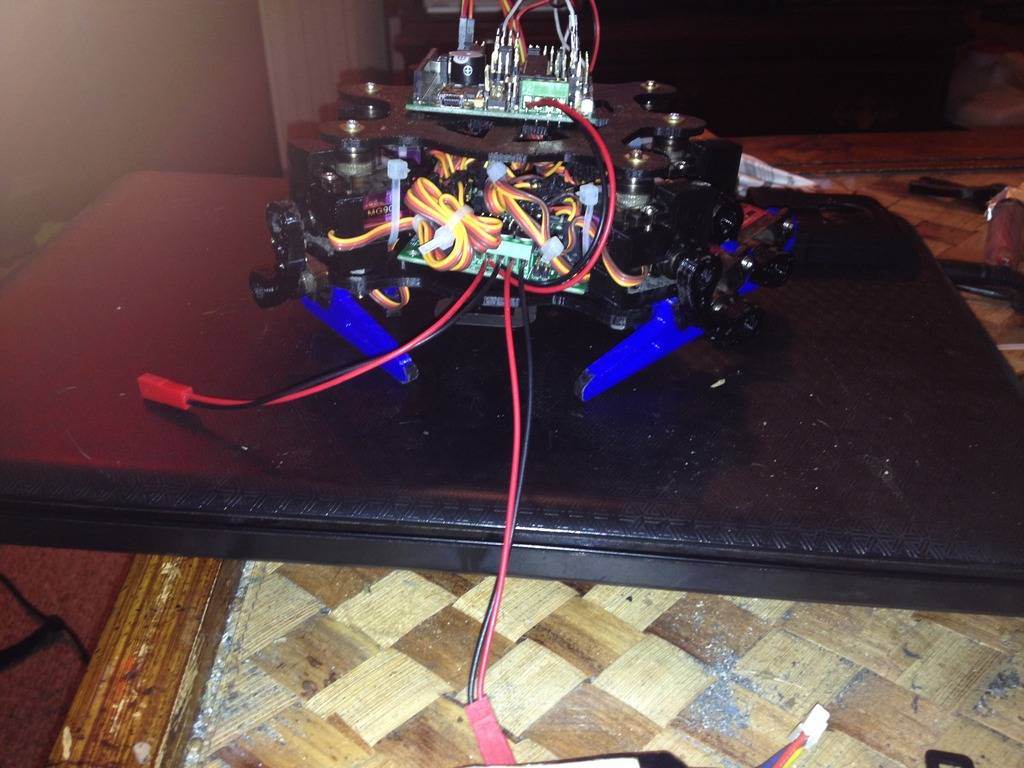
Ok my hexapod looks and
Ok my hexapod looks and functions like this hex…
http://www.lynxmotion.com/c-117-phoenix.aspx
Ok I’m looking at the
Ok I’m looking at the Hex_Cfg.h for the code you linked me to.
Under the heading Min/Max angles, the comment is given "mechanical limits" of the leg and gives numbers. Is this the min max angles of 180* which is the limit of my servo or the legs min and max, forward reverse till they run into each other?
Under the leg dimensions heading and after the first legs set of numbers I get this "cXXCoxaLength" after each tibia femur Coxa definition. Do I remove the cXXCoxaLength with actual numbers?
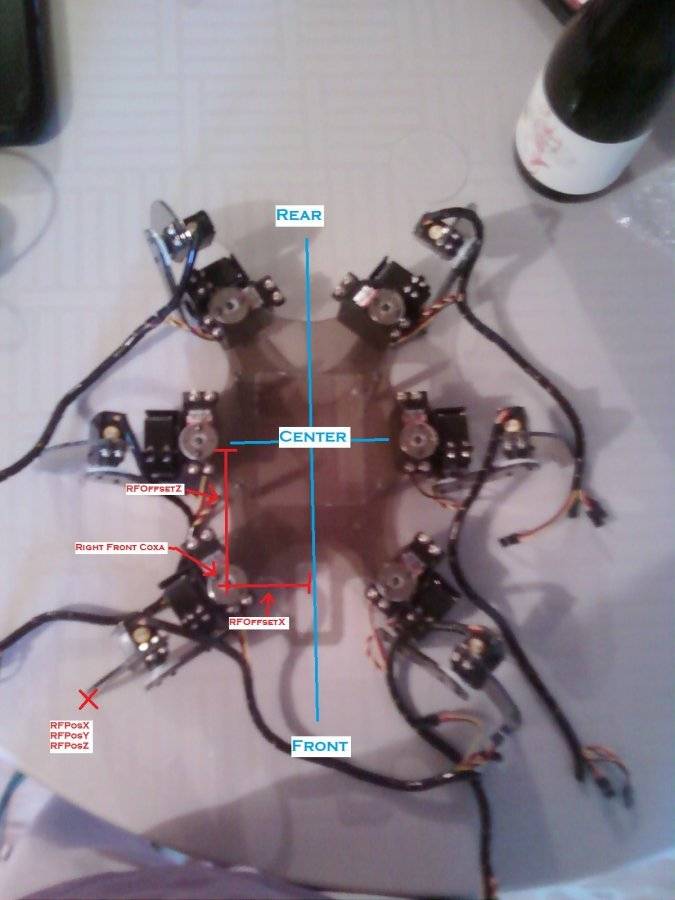
Under body dimensions heading. What and where are Z and X? How exactly do i measure for these?
Since I'm using a 3dof leg do comment out the Tars definitions?
Would this be an acurate
Would this be an acurate representation of how im supposed to make my measurements???
Also, how hard would it be
Also, how hard would it be to port the botboarduino firmware to an Arduino nano instead?
Ok first about the offsets.
Ok first about the offsets. How do I come up with the -negative numbers.
I was able to download the firmware on to my nano but in order for it work with the ssc I need to change a couple things. First I need to change the pins in the config to match the pins for the Nano to be hooked up to the PS2 wireless head.
Now I need the need the nano to talk to the SSC-32u. When using the botboarduino I would use 12 &13 but since those are being used by the PS2 head would I instead use pins 1 & 0.
Is any of this correct?
(No subject)
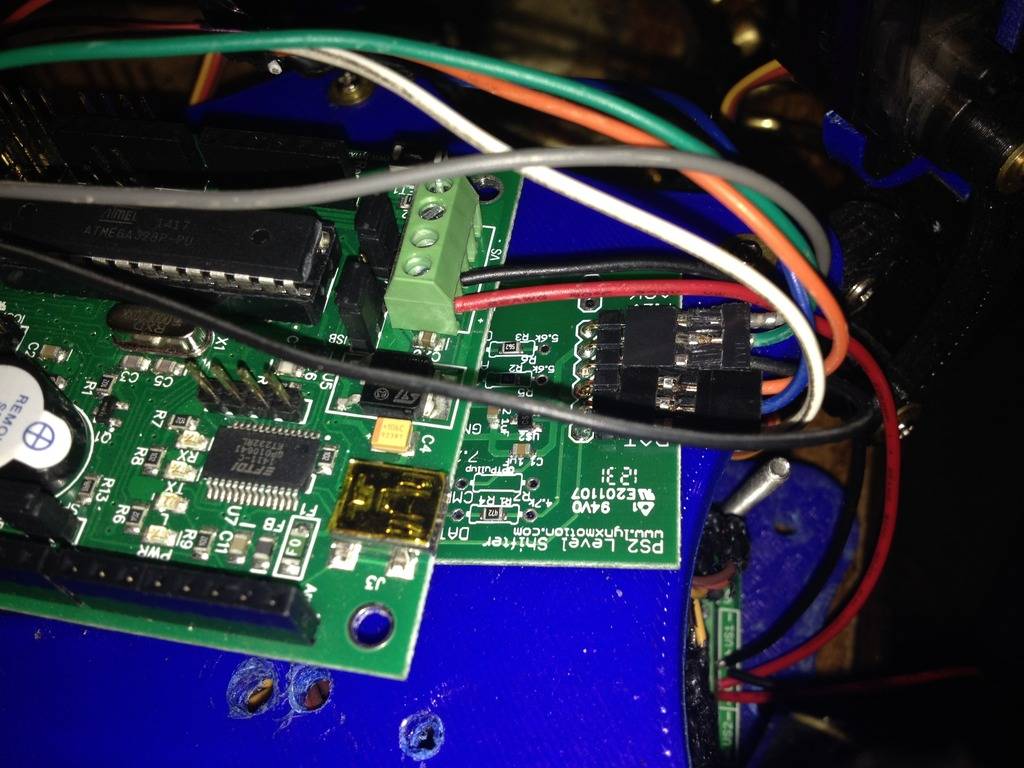
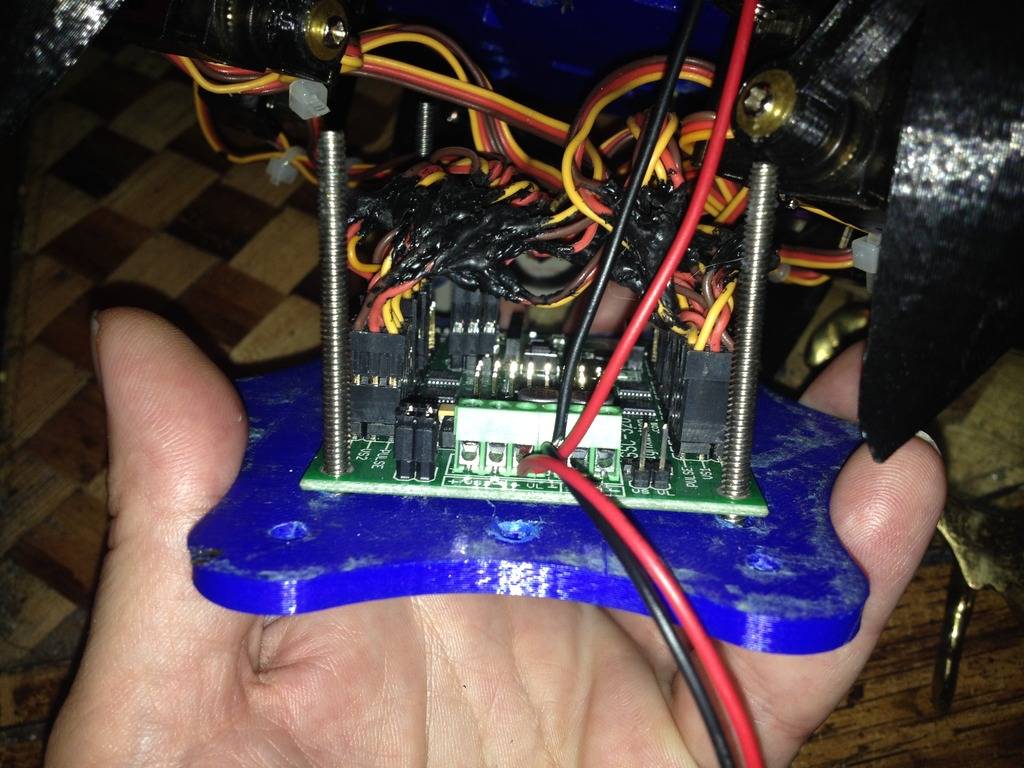
Here’s a couple pics of my wiring. I’m not connected to VS2 till someone can tell me why it’s over heating my wires.
Having trouble with my
Having trouble with my botboarduino and sac-32u. I’m using the tutorial listed above in the second post.
I've got a 7.v connected to the SSC-32U VL and a two jumper wires running from the SSC-32u VL to the botboarduino. I have a wire connected to the VS1 on the SSC-32u for power using a battery with a 5v 9A BEC.
When I hook it up the the sequencer the servos twitch when power is added but will not mo the servos
Solved the hot wires. Didnt
I wish they could make thier products a lil smaller to smaller bots.
Ok now im not gettinh power to my PS2 wireless head. I tested the pins and im getting 1.94v.
Do i need to have the VS on the botboatduino hooked up to power too?
Ok so after a couple weeks I
Ok so after a couple weeks I can finally get my robot to move. But it puts the legs under the bot with the coxas swept back.
I calibrated it using the SSC-32 servo sequencer utility. When I try to use the Hexapod calibration program it won't connect.
<p
All right guys, i would like
All right guys, i would like to trade out my botboarduino since at the moment they seem to be extinct, and i would like to use something small like a nano or something. I understand that the micro-controller does all the thinking and transfers commands to the SSC-32u using a tx/rx line and ground.
Besides the pin numbers to accept the ps2 controller functions, what else can yall foresee that will need changing?





