

In last video, robot Adam controlled by VR HTC VIVE. Since, the kinematic scheme of the robot is different from the human, the principle of reverse kinematics was used to control it. This work was done within 2 months.
This work is the result of a collaboration between VRlabDV (@VRlabDV - company that create games for VR) and Robot LTD CO (@alexander.gan), company (startup) that design personal robot named Adam. Robot Adam is designed for University and laboratorys, mostly for research and education purposes, but also for expo and entertainment.
Robot LTD Co - small startup is resident of "Skolkovo" foundation in Russia, like Silicon Valley in California USA.
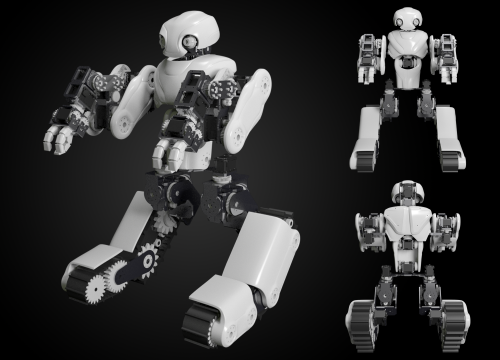
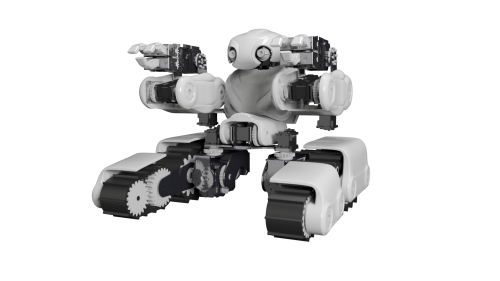
New photo!








What's New?
The kinematics of the robot in the articulation of the knees has been improved, gear gearing has been modernized in the same area, has been introduced quick-release joints have been introduced in the area of the forearm, hands, and the upper press. The manipulators have been modernized, their weight has decreased, the design has changed, and the four-fingered manipulator has been developed. A printed circuit board is developed - a dynamic RGB backlight with an MCU for the active stereoscopic vision of the robot, this highlight will express the emotions of the robot, as well as display its status; The modification of the demonstration version of the control program has been made, namely, a function by means of which it is possible to generate and store various manipulator movements is added.

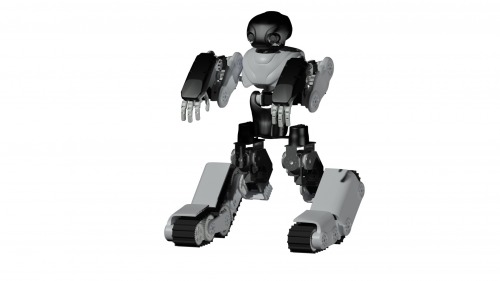
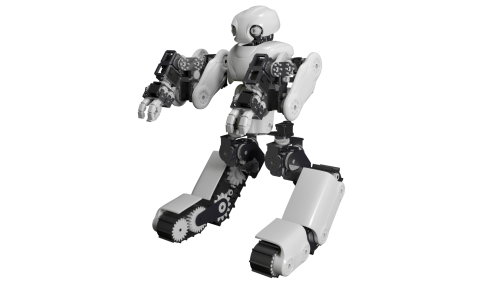
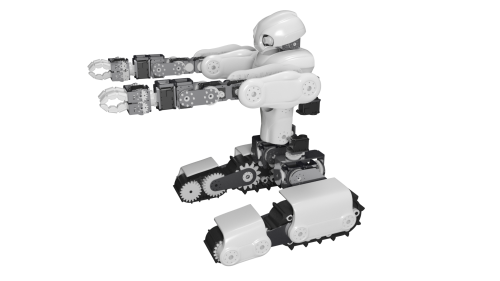
Personal Robot Adam is positioned as a programmable humanoid robot for educational purposes and research. The robot is designed for universities and laboratories for research and education in robotics. The project is unique in the use of active stereoscopic vision system. Adam is able to change the viewing angle and easily recognize objects in contrast to their counterparts that use a system of passive view. Active stereo vision system is also used to estimate the distance to the desired objectives and works on the principle that the closer to the goal, the more accurate assessment of target coordinate readings. Adam also has a control system that allows you to control him in one or two clicks. An example of such control may be a video game type strategy. Those you click on the destination - video on a portable device (mobile phone, tablet, laptop, PC) is transferred from the active stereovision system, and choose the action after which the robot is doing everything yourself. Robot manipulators is operated on the principle of inverse kinematics, and the mathematical model of the manipulator control has been developed by our team, and has a feature different from the classical one. Therefore, the same principle to manage all of the robot's body. Moreover, the robot is able to transform and to be more compact or massive, depending on the task. Adam has 33 degrees of freedom, the chassis by means of which it can be moved in several ways - to walk or ride. Also you can use robot in your home like security robot and like robot assistant.
Website: www.robotco.ru
Video - test manipulators: https://www.youtube.com/watch?v=G8lP9ThTQRM&t=19s
Video - Innorobo2016 expo: https://www.youtube.com/watch?v=wUHvITrqMtA&t=10s
Presentation of the project: https://www.youtube.com/watch?v=MsMDIqyhOCI
Instagram: https://www.instagram.com/alexander.gan/
Facebook: https://www.facebook.com/Adamrobot/?ref=bookmarks
YouTube: https://www.youtube.com/user/VLCITYify/videos?sort=dd&view=0&shelf_id=0








Personal robot Adam for research and education
- Actuators / output devices: AX-18, RX-24F, MX-28, RX-64, MX-64R, dynamixel
- Control method: autonomous, USB, WI-FI
- CPU: Raspberry Pi 3B
- Operating system: Linux, Windows
- Power source: 4S 14.8v 8000mAh Battery
- Programming language: C++, C#
- Sensors / input devices: video camera, ultrasonic
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/personal-robot-adam