

Having created my autonomous rover, I wanted to create one that I could control with my Mac and provide live video feedback.
Bought this RC toy from Radio Shack for around 7 bucks! Took apart the RF transmitter and hooked it up to my Mac's USB port. I had an old Nokia phone which I'm using to provide live video feedback to my mac via bluetooth.
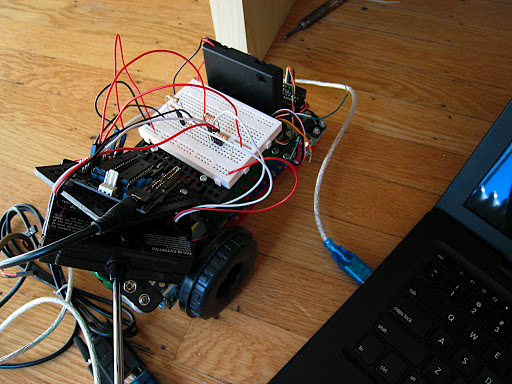
Here are some pictures of the rover and the setup
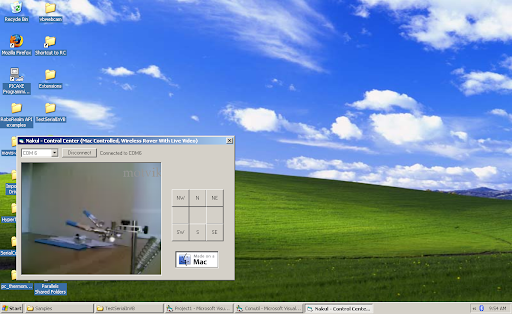
The command center that ties the live video, serial communications and my mac written in VB
The streetcar hooked up to my trusted Nokia!

The RF transmitter hooked up to my Mac
If I don't take into account my Mac or the old phone, the whole setup cost less than $50 bucks! Of course, me being a software guy with little knowledge of electronics, there was a whole lot of reading and research time involved! But a lot of fun! :)
PC controlled wireless rover with live video feedback via bluetooth
- Control method: Mac
- CPU: Picaxe
- Operating system: Windows
- Programming language: VB
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/pc-controlled-wireless-robot-with-live-video-feedback-my-second-robot-google-streetcar-rover
