

PartyBot is a modular robot which was designed for the main purpose of being an educative platform to be shown at Campus Parties. This robot was created for the Asociación de Robotica y Domotica de España (which is a non-profit, nation-wide robotic association in Spain) will use it at those events to teach the youngest and/or robotic newcomers some first steps in robotics.
So as an educative robot, it was designed modular. Modular means that there are four parts well separated: the chassis, and 3 different PCBs (the power supply PCB, the sensors/actuators hub PCB, and the control PCB). Addtionally to the physical part, it is the software part, that uses an easy to program brain as control part, that is a Pinguino board.
As you can see in the previous link, Pinguino is an Arduino-like board which is based on Microchip PIC microcontroller. PartyBot uses the Pinguino with PIC 18F2550.
The best of Pinguino is that it is an open source & open collaboration project. There is a community making Pinguino to evolve and improve. And resources and Pinguino supporters in the net is growing everyday. Also there are already a good set of libraries available which have been used to program the PartyBot.
Just for those of you who wants to know more about Pinguino, here you have a colection of links with almost all that has been created for it up to now:
The goal of the PartyBot robot is to solve labyrinths/mazes and that's why uses 4 sharp IR sensors pointing in the four directions of the robot.
It has also recycled mouse sensors as encoders and mouse buttons as switch bumpers.
A funny part for me in the creation process was to firstly design everything in a 3D designer program. This program is also a free one. I used Google SketchUp to produce these images of the robot before starting to build it physically:




The chassis was finally made of methacrylate. Vertical rods are threaded bars of 4 mm in diameter. All PCBs and methacrylate sheets have three holes to be inserted from the top part of the robot in those bars. Nuts are used to get part fixed in this vertical structure. Methacrylate is a little bit delicated when drilling or cuting it. So both cuts and drills were done by hand using a low speed saw and drill (so basically manual saw and a brace for drills).
All the chassis and PCBs have been finished (well there are a couple of improvements I want to make on some PCB, so I will create a new one), but the programming is the step where I'm right now working on.
In the videos you can see the structure (in the first one), and a short demo that just uses bumpers and motors. It is a kind of tutorial in order to show how to create a program in C using the Pinguino IDE for controlling minimally the robot. The tricky part is that those are in spanish. If people are interested I could subtitle them.
If you want more details about how the robot was build, more pics, or some tricks you can visit the Wiki page of PartyBot and the Blog of PartyBot just for tracking improvements (also in spanish, sorry).
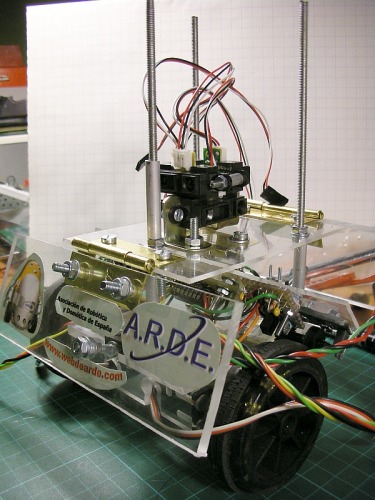
Some pics of the chassis without boards:

Here some images about the control PCB, which has a Pinguino board piggybacked:


solves laberythms
- Actuators / output devices: Continuous rotation servos x2
- Control method: autonomous
- CPU: Pinguino version 18F2550
- Operating system: none
- Power source: external connector, 7.5V LiPo Battery
- Programming language: C
- Sensors / input devices: Sharp GP2D120 IR sensor x4, Bumper switches x2, ps2 mouse encoders x2
- Target environment: indoor maze
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/partybot

