

Several months ago I have found on my "homestock" pair of metal tuning treads for Heng Long Panzer Tiger. Had no idea what to do with that I put it back. Later I saw on E-bay used chassis which fits with the tracks together. Only motors were missing. After I bought them (tuning version) I put it all together and tried to run it. First thing I realised that to control such hungry motors using electronic regulators is just an expensive experiment. I have vaporized pair of L298s. So I decided to do it in old-fashioned way using 4 relays.

Second challenge was how to avoid "collateral damages" linked to uncontrolled movement of such heavy mechanism. This is critical especially in household with 2 kids, 2 cats and 1 wife. I used 8 IR sensors for close proximity obstacles. Four of them are in corners looking horizontaly. Other four look down to see deeper problems like staircase. Also the second fours are used for fast switch-off. When you take the tank from floor and all of them are activated it switches everything off. I play with logic of reactions based on sensor status. They are connected to all 8 pis of portD so it gives always some binary figure which is easy to analyze.

Sharp IR sensor is there to evaluate if the front obstacle is really so serious. E.g. if the hole is too deep or too wide. For this purpose it is looking 30° down.
In picture below you can see power controll. Main source is one Lipo battery which supplies motor directly. For headlights and future servos there is 6V branch. For electronics there is 5.5V branch. Also there is Ampmeter to see how hungry the robot is.

Currently I attached some other sensors - GPS, inclinometer (to measure the slope), compass and odometer. All are attached and continuously read but the data are not used for any purposes yet. So the robot know where it is but does not bother. This is space for further development.
Program structure was another question. To keep it easy for extension i split the logic of program into 3 levels.
1st level - instincts.
This senses movements and surrounding in order to avoid damages. This cannot be overriden by other commands. Routines controll motors based on othe commands but have VETO rights. Basics are fully operational.
2nd level - commands
Reads TV remote or instructions from higher levels of program. These routines controlls the movement, direction and distance of the ride. TV remote controll is fully operational now.
3rd level - mission
Overall controll of machine. Sets poins of where to go and what to do. Orders are executed by level 2 and controlled by level 1.
On this level I am working now.
As you see this robot is not ready to accomplish any other task now. I am working on second part - the turret.
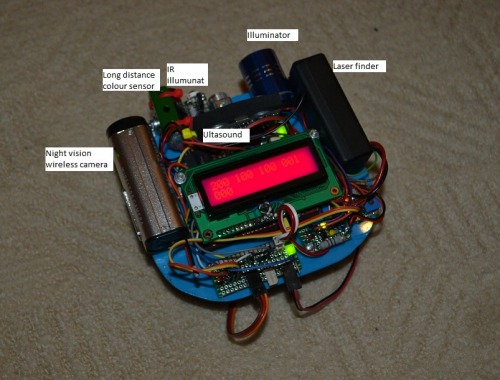

All sensors are fully functional. It can find target via laserfinder (measurig reflection), check its colour (color sensor 256 bit RGB) and measure its distance.
Turret is idependent in its job having dedicated Picaxe 28x1. Measurements are visible on display and sent to main 40x2 via serial based on request.
Now it requires just to put it together. Turret is mounted on servo below blue plate.
Below are links to videos of first movements of chassis.
When the tank approaches obstacle right in front it stops. This is temporary solution. I need to think about what the reaction should be. So, even it is not clearly visible from videos, it is not stopping because the obstacle is too strong but due to program setting. Also when it approaches the wall it does not bum it but stops 1 cm before.
To be continued...
Completes missions, follow IR commands, "search & destroy", avoids traps
- Actuators / output devices: 2x DC geared
- Control method: program, TV remote, independent
- CPU: Picaxe 40X2
- Power source: LiPo 7, 2V 5000 mAh
- Sensors / input devices: GPS, compass, odometer, 8x IR detector, 1x IR Sharp, inclinometer, TV IR
- Target environment: grass (no mud), outdoor, Sand, stone
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/panzer-tiger-1-chassis