I added some encoders to the two front wheels of my 4WD1, but I realize that doing odometry on a 4 wheel robot is not an easy task, because when the robot turns, at least two wheels have to slide (which is obviously not taken into account by the encoders), and because it’s hard to define where the rotation center is when the robot turns
I’m planning to change the two wheels at the back of the robot with some omniwheels such as those (I would use the 80mm version), so that the sliding problem goes away. Has anyone does that? How will I fix the omniwheel to the shaft of the motor?
Having used omniwheels in the past, I would say if you really want to use them, make them unpowered, and just keep them in place in the middle of a shaft.
But, that does kinda get rid of the whole 4WD concept…
Also, you might want to look at the double omni wheels, that have two sets of rollers. I think those would be better for a more continuous circle with the ground.
(example: acroname.com/robotics/parts/ … OLLER.html )
Edit: Just noticed your link already said you have to order in pairs…
The omniwheels in the link above are, as you pointed out, sold in pairs, and they’re designed to be used that way, with keys on both faces that lock together at 120-degree increments so that they are held in the familiar 3-and-3 omniwheel arrangement.
Many yonks ago, I got sets of both the large and small versions in order to experiment with omniwheels in a holonomic drive system. Attaching them to the motor shafts has always been something of an issue. For the small, 1.9-inch versions (RW29), I ended up using a weird assembly that mounted a three-hole T-nut onto a servo horn and a nylon bolt with a hole drilled down into its head for support on the other end. The screws holding the T-nut to the servo horn act to key the wheel to the shaft so that backing out under rotation isn’t an issue.
The 3.15-inch versions (RW30) are still in the works. To get those mounted to 6mm motor shafts, a friend of mine with a machine shop is fabricating a trio of aluminum shaft adapters that will do essentially the same thing, but on a larger scale.
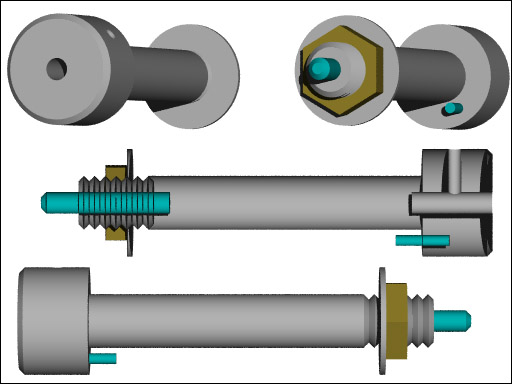
(final output will be somewhat different - this was just to get the concept across)
It’s more-or-less a 1/2" aluminum bolt with a couple of 6mm holes drilled down its core, and a setscrew in the “head” area to hold it onto the motor shaft. It’s got a pin in the ‘head’ to key it to the wheel. The plan is just for a lightweight platform for experimenting, rather than anything that will be supporting a lot of weight, so mounting directly to the motor shafts should be fine for this purpose. If I was being serious about it, I’d be mounting it to a shaft with some sort of indirect drive arrangement, so that the motor shafts weren’t supporting the bot’s weight.
And you have no idea where you bought those, right?
I wonder if some of the hubs sold by lynxmotion could work… The specification of the omniwheel says it has a 12.7mm bore, so it could very well be that the 12mm Hex Mounting Hub just fit in it?
True, but the entire hub might fit in the 12.7mm bore of the tire, and (with help of a little bit of hot glue maybe) might stay there.
If 12mm is the “diameter” of the hex, then looking at the pictures, it seems like the cylinder might very well be 12.7mm in diameter
If you are looking for a set of the Omni wheels and some of the inserts which will mount on a servo, I have a brand new set of the wheels and the insets I will sell as a package.
If all you’re looking to do is freewheel the omniwheels, then it really couldn’t be easier with the Interroll wheels from omniwheel.com.
The hubs don’t have an internal key of any sort, so you just place two of them together so that their molded-in keys lock the two halves together, slip them over a smooth shaft of the proper diameter for the ID of your wheels, and you’re done.
I haven’t tried the Acroname wheels, but it looks as though they have smooth bores as well, so the process should be the same.
Wow, those are spendy wheels. I think I am going to have to use regular wheels for casters. Those are too expensive for me. I want to put two casters on front and two on the rear.