As you saw from the video, I am using 2 Sharp distance sensors in a cross-fire configuration. As the head sweeps, only one is activated at a time therefore each is reading it's half of the sweep with a little over lap in the middle. I have found that this is twice as fast as a single sensor having to do a 180 degree sweep. The speaker and tune command work great I even added an amp! However, at the time of the video, I was using an older version of the code I wrote and it wasn't coded to play anything -It is now loaded with the theme from the A-Team like it should be. Both Picaxes have an IR input and will take commands from the remote and can talk to each other via IR -See next picture.
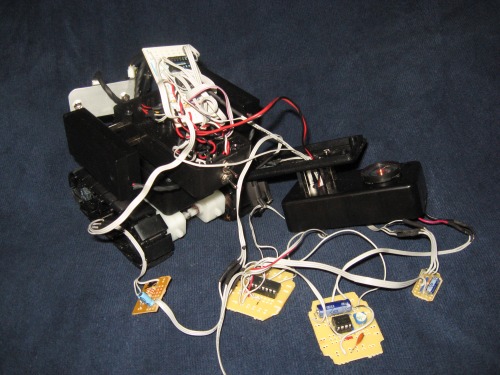
The boards you see (from left to right):
The resistors and cap to make the IR input sensor work
The upper picaxe 14m
The amplifier for the speaker (using a LM386) -It is very loud
The other resistor/ cap board for the IR input sensor for the other 14m
--At the top of the picture in the main body is the main picaxe 14m board and finally the motor driver is on still another board stuffed in to the very bottom chassis.
Here you can see the 2 IR LED's and Sensors -The green LED's are tied to the IR ones so I know they are working (good for trouble shooting) I still have 4 inputs and 3 outputs left on the upper 14m so I hope to add some more stuff. Maybe a LDR for some automatic headlights!
Standard Navigation plus IR Remote Control
Actuators / output devices: 2 GM3's 2 IR LED's for communication and speaker
Hey, Chris, that’s a pretty awesome robot, congratulations. I like the remote control implementation; it seems that has a lot of functionalities. By the way, how many Heinekens take to build it?
Clever use of a sensor array (the 2 IR modules). Your craftmanship shows through - very well made. Good video too. Did you use those black plastic boxes from radio shack for electronic containers? What are your plans for it in the future?
Yes sir, those are the little experiment boxes you get from Radio Shack. As for the future thing, I still have a few inputs and outputs left on one of the picaxes but… Well, I don’t want to say much, but it might be towing my next project…
PBR Rocks… Well, I would prefer NewCastle but at 8 bucks a 6 pack…
The sensors are these simply from radio shack (276-640) but you can get them anywhere just be sure to get the 3 pin ones not just an IR transistor or the like with only 2 pins. You will need to solder up a little board with a couple resistors and a cap to be able to have it talk to your picaxe. Here is the PDF (the circut is on page 2)
You will need to decide which IR code to use based on your chip, some like irin or ifrain and some like infrain2 -just read the manual. Also, if you are using a picaxe 28 on the standard 28 board there is already a spot on that board for the IR receiver, resistors and cap.
The IR in commands are sorta funny. When the picaxe runs any of the IR commands it will not do anything else. It is my experience (which isn’t much) that the robot will NOT drive around AND be waiting for a new remote command at the same time. All it can do with any of the IR commands is wait for a command, do it, then wait again. On this little tank bot, I had to do some funny connections to get around this problem.
If you take a look at my code, please understand it is just what I wrote to get working on this project. For instance, if you notice on the main code, I used 1 set of F,R,R,L codes for when it is running off the distance sensors and still another full set of F,R,R,L codes for when it is running off the remote. It really should just be one set with a variable plugged in to add the pause command needed to make the remote work. To the point, this code works -no problems- however it is redundant, chunky and not written by a code guy -Just use it for ideas and when you write yours, make it better!
“Our deepest fear is not that we are inadequate. Our deepest fear is that we are powerful beyond measure. It is our light, not our darkness that most frightens us…" -Marianne Williamson
There seems to be something wrong with your code, Chris. Your robot is AVOIDING BEER… when he should be running towards it! Wait… Is it because you don´t like to share it??