



Ok, This one is pretty good...
Well here it is folks,
As you saw from the video, I am using 2 Sharp distance sensors in a cross-fire configuration. As the head sweeps, only one is activated at a time therefore each is reading it's half of the sweep with a little over lap in the middle. I have found that this is twice as fast as a single sensor having to do a 180 degree sweep. The speaker and tune command work great I even added an amp! However, at the time of the video, I was using an older version of the code I wrote and it wasn't coded to play anything -It is now loaded with the theme from the A-Team like it should be. Both Picaxes have an IR input and will take commands from the remote and can talk to each other via IR -See next picture.
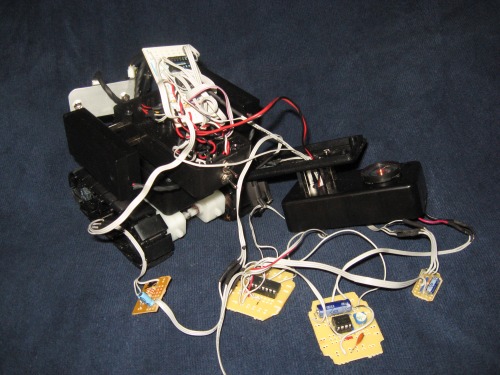
The boards you see (from left to right):
The resistors and cap to make the IR input sensor work
The upper picaxe 14m
The amplifier for the speaker (using a LM386) -It is very loud
The other resistor/ cap board for the IR input sensor for the other 14m
--At the top of the picture in the main body is the main picaxe 14m board and finally the motor driver is on still another board stuffed in to the very bottom chassis.

Here you can see the 2 IR LED's and Sensors -The green LED's are tied to the IR ones so I know they are working (good for trouble shooting) I still have 4 inputs and 3 outputs left on the upper 14m so I hope to add some more stuff. Maybe a LDR for some automatic headlights!
Standard Navigation plus IR Remote Control
- Actuators / output devices: 2 GM3's 2 IR LED's for communication and speaker
- Control method: Auto/ Manual
- CPU: (2) Picaxe 14m's
- Power source: 4 AA's
- Programming language: Basic
- Sensors / input devices: 2 Sharp Distance Sensors, 2 IR Sensors
- Target environment: indoors