

Hi guys, i've been reading about all of your amazing robots for months now so I thought it must be time to post something of my own. So here it is "Norm" I brought the start here robot in January and loved it I finally got to build an actual robot. Since then I have been trying to upgrade him in various ways using this site for inspiration the main ones for this project being TheBromz for his excelent BigTrak project and MarkusB in how to make a arm from ABS.
After making the SH robot my fist thought was it could do with an upgrade in size and speed. After a lot of searching about for different chassis to buy or toys to hack I went with the new model BigTrak. I got one second hand for £15 and it couldn't have been easier to take apart and transfer the robot electronics to it took about an hour in total to get it running. Once it was up and runnig I had a lot of problems with the obstacle avoidance code due to it's increased speed and size took a long time to get sorted and it still occasionally gets stuck.
Next I added a photo-transistor to the front made myself a little IR beacon and taught the robot to find it, easier than i thought just reversing the avoidance code.
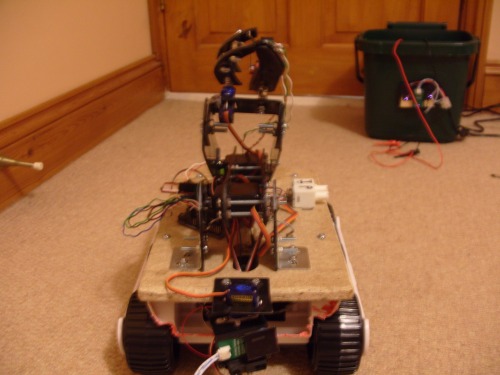
After a few over ambitous and costly errors i decided on giving it an arm. Not too much drama here just a lot of hours cutting plastic and a couple of redesigns later and it kind of works, not the best looking arm in the world but it works. Got the arm made then had a lot of problems with the servos acting weird a jittery and generally not doing what they were told so recoded it after looking up lot of excellent advice on here and finally got it sorted. Now it dirves about fine and hits the bucket every time. Just have to find a way of getting it to come back to me and adding another battery back to improve the arm performance.
Sorry about the poor quality of the video and pictures promise i'll post some better ones soon.
Any questions please feel free to ask.
Thanks for reading.
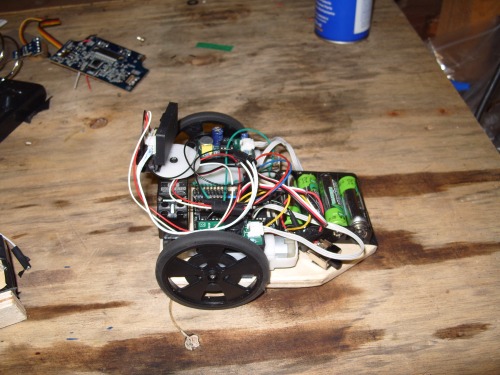
This is my start here robot before the transplant.
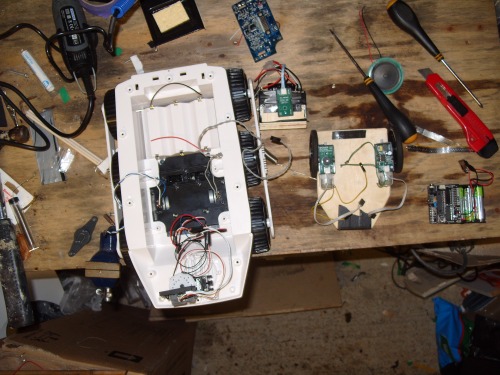
Mid transplant to the BigTrak body.
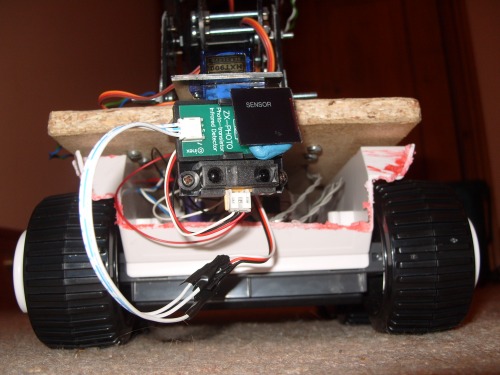
Not the best looking face in the world. The piece of plastic over the Photo-transistor is from a cd player over the remote control reciever, it acts as a daylight filter and still lets it see the IR beacon very handy and free.
Bucket with homing beacon in the background.
navigates around looking to put something in a box.
- Actuators / output devices: 2 micro servos, 2 regular servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4 AA batteries
- Sensors / input devices: Sharp IR, IR phototransistor
- Target environment: indoor and outdoor to some extent
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/norm