

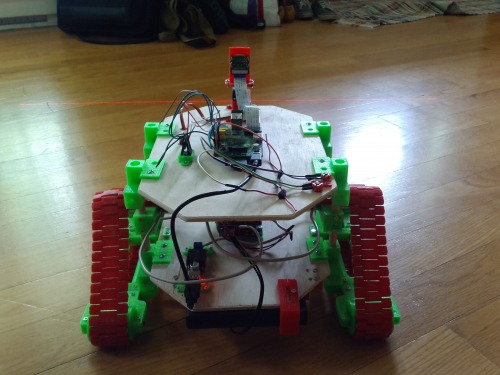
This robot started as a 3D-printing challenge: design and print tank tracks with PLA. In my first attempts, the links would snap without anything to keep them together. It didn't work because the links would split away too easily. After a few iterations, I settled on a design where the links are pierced and a short piece of wire secures the links together.
Noiz-E is equipped with a Raspberry Pi B, an Arduino Mega, a Raspberry pi camera mounted on a servo motor, a laser line, two headlights and a few bumper switches. The only control mode currently supported is teleoperation through a socket connection.
It's name comes from the lovely sound that the hard PLA tracks make when they hit the kitchen's ceramic tiles...
The code is on github.
Raspberry Pi: https://github.com/sebastiengilbert73/noize_robot
Arduino: https://github.com/sebastiengilbert73/noize_robot_arduino

Next improvements:
- An arm and a gripper
- A more powerful WiFi antenna
- Some autonomous behaviour
Navigate through the house, while producing a maximum of decibels
- Actuators / output devices: Servos, laser
- Control method: WiFi, Telepresence or remotecontrolled
- CPU: Arduino Mega 2560, Raspberry Pi Version B
- Operating system: Raspbian, ROS Groovy
- Power source: 8 AA pattery pack
- Programming language: C++, arduino/wiring
- Sensors / input devices: bumper switch x2, camera
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/noiz-e