

basically an update of my previous bot scooter. more updates to come.
some pictures:
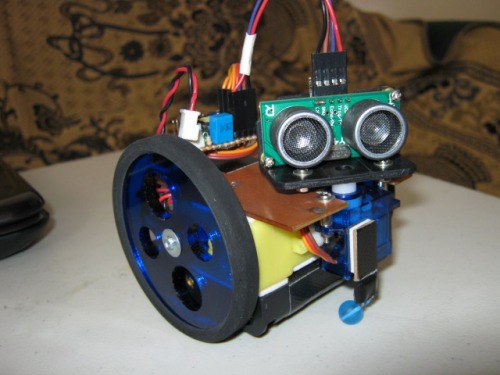
HEY!! its the new me :-) HELLO! still "no name" though.. beep beeeeep beep
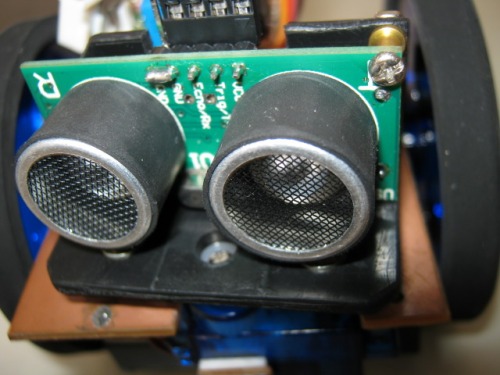
shown how the servo is mounted, with the plasctic L-bracket to hold the ultrasonic module.
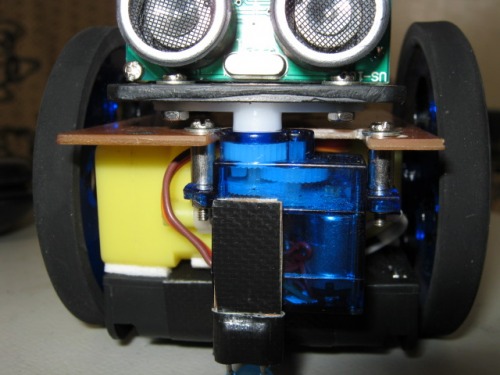
and another view
top side showing the board and 08M picaxe.. no power switch yet :).. servo wires neatly tucked..though I will probably have to re-do the wirings going to the ultrasonic module..once I get a hold of those really flexible wires..
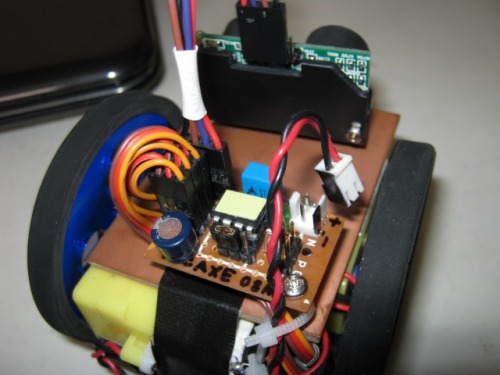
underside..showing the Li-Ion battery (3.6V nominal) as my power source.. "strapped" to the bottom with duct tape .. on the far left, is the front skidder/roller.. a bent paperclip + plastic ball with hole on the center... you could get one of those in art shops..
more pics, coming soon.. video uploading
oh and by the way, BIG thanks to fellow LMRer 'chuckcrunch' for the code on this one.. its from his 'china syndrome' bot ..was very excited with my picaxe chip hehehe so had to have some running codes to test it . had to modify a bit the code to suit my hardware.. could have added more traits but thats just it, its only 08M (about 212bytes program out of 256bytes) hehehe so I will just have to leave it at that... :)
navigate around ultrasound sensor
- Actuators / output devices: servo and modified servos
- Control method: autonomous
- CPU: picaxe 08M
- Power source: 3.6v li-ion battery
- Programming language: Picaxe basic
- Sensors / input devices: ultrasound
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/no-name-yet