

Hello community!
Hopefully this question won’t be too complex and complicated.
First off I am no engineer, just an aspiring one. I don’t have any education within the topic of robotics or electronics. I have on the other hand, an immense drive to learn and curiosity.
So if I seem like an absolute dummy, that’s because I am. I hope that won’t be too bothersome, and I highly appreciate the help you’ll give!
So let me explain. I am working on a project which requires me to measure the distance of a person walking towards a “box” I have placed along a walkway. It’s not literally on the ground, it can be placed anything from 1-3 meters high, whatever’s best. I have looked into a lot of different sensors like PIR, Ultrasonic, TOF, LIDAR etc. but I’ve yet to figure out what would be cheapest and best for the task. As I said, I’m not super knowledgeable about all of this.
The box isn’t powered by cable, so it’s limited to a 12v battery, with AH ranging from 20-100 (whatever’s needed) but also charged by a solar panel. It doesn’t have to measure distances constantly, as there aren’t people walking past the box all the time. Maybe 3-5 people every 20 min ish.
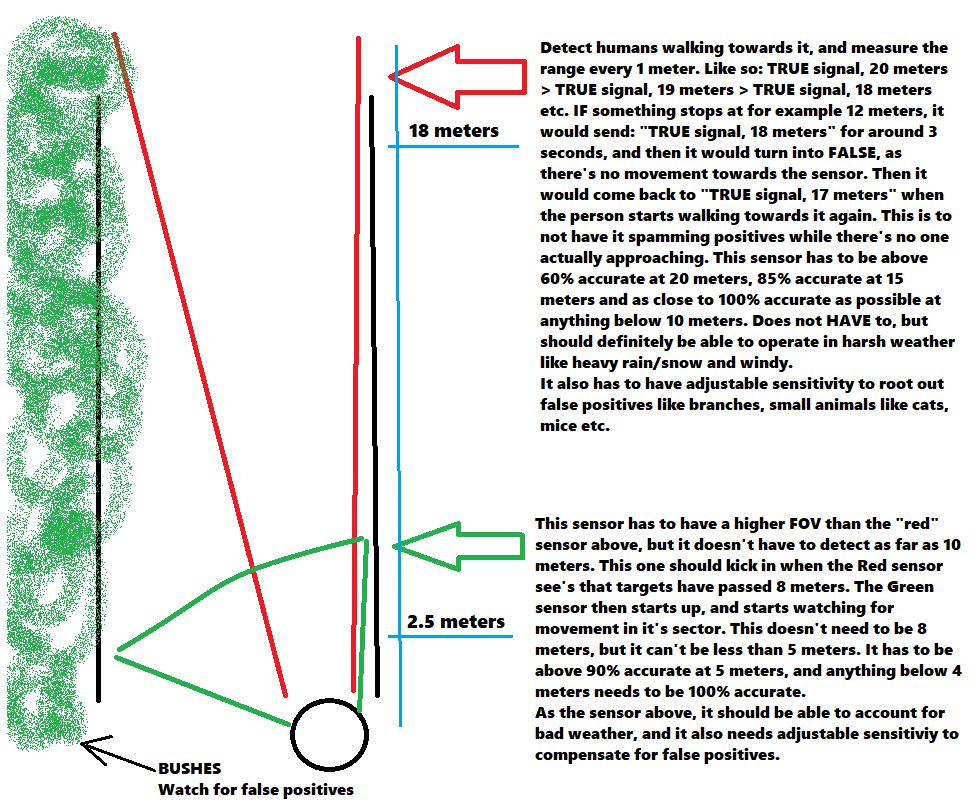
I have made a picture in paint (very professional ikr) which shows what I was thinking and how it would work etc.
Here is a gyazo link: https://i.gyazo.com/dd54b8439e2ebb40c3b0ba1ec50a568f.png (hopefully it doesn’t get deleted)
Basically, I think I would need 2 sensors. One for accurate measurements close by (5-8 meters) with a wider FOV, and then 8-20 meters with a more narrow FOV.
Again, thanks a lot for any reply and help!

{kind=link}