I am currently working on a project for school. The idea was to create a robot that could perform pathfinding functions using A*. The path is found using a virtual grid of nodes programmed into the Arduino where "X"s are non-passable objects, "0" as the start, and "1" as the destination.
Not sure how to insert code on this forum. Someone could help me out with that as well...)
Example:
char createPlane[][planeSizeX] = {{'.', '.', '.', '.', '.', '.', 'X', '.', '.', '.', '.', '.', '.'}, {'.', '.', '.', '.', '.', '.', 'X', '.', '.', '.', '.', '.', '.'}, {'.', '.', '.', '.', '.', '.', 'X', '.', 'X', '.', 'X', 'X', 'X'}, {'.', '.', '.', '.', '.', '.', 'X', '.', 'X', '.', '.', '0', '.'}, {'.', '.', '.', '.', '.', '.', '.', '1', 'X', 'X', 'X', 'X', 'X'}, {'.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.'}, {'.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.'}, {'.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.', '.'}};
The instructions for the path above would be: left, left, up, up, left, left, down, down, down
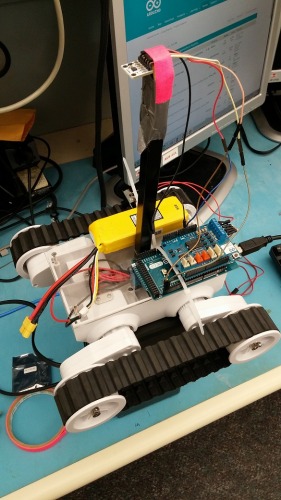
Current parts:
Dagu Rover 5 tracked robot (no encoders, 2 motors)
Arduino Mega 2560
Arduino Motor Shield
HMC5883L magnetometer compass
My pathfinding application works great and I know I am building the correct instructions for the robot to follow. At this point, I have already spent weeks just trying to get this thing to turn 90 degrees consistently. It is vital for my robot to turn as accurately as possible in order to arrive at the correct destination.
I bought the HMC5883L compass hoping that it would allow me to turn 90 degrees. I have gotten to the point where it will turn until the correct heading is reached (according to the compass), but it is not consistent at all. Sometimes too much, sometimes not enough.
Currently, I am taking an average of the X and Y readings along with the adjustment values for X and Y that I calculated using this http://forum.arduino.cc/index.php?topic=149073.0. I believe I have correct declination for my area as well.
float getAvg(float array[]) { float average = 0; for (int i = 0; i < 5; i++) average += array[i]; average /= 5; return average; }float getHeading(HMC5883L &compass)
{
float declinationAngle = 12.183;
float xScaled[5];
float yScaled[5];
//MagnetometerRaw raw;
MagnetometerScaled scaled;
for (int i = 0; i < 5; i++)
{
//raw = compass.ReadRawAxis();
scaled = compass.ReadScaledAxis();
xScaled[i] = (scaled.XAxis - xAdj);
yScaled[i] = (scaled.YAxis - yAdj);
}
float xFinal = getAvg(xScaled);
float yFinal = getAvg(yScaled);
float heading = atan2(yFinal, xFinal);
heading += declinationAngle / 1000;
if(heading < 0)
heading += 2*PI;
if(heading > 2*PI)
heading -= 2*PI;
heading *= 180/M_PI;
return heading;
}
Even with all of this, I am still not getting the precision I need for turning. Please let me know of any ideas any of you have that would allow me to have the precision in turning that I am looking for.