

For controller I'm using a PIC18F4550 with MSHP Bootloader ( USB ), in a self made and obvious Arduino wanna be copy, I call it PICUino :D

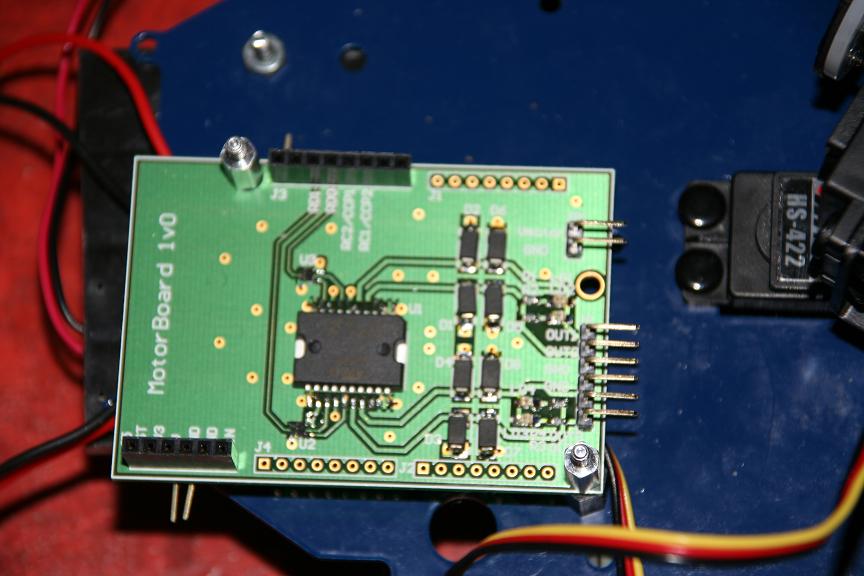
For the motor control a exact copy of the motor control shield for Arduino, at least for the schematic
For chassis we have the Robot Rover for Arduino (Tank Kit)
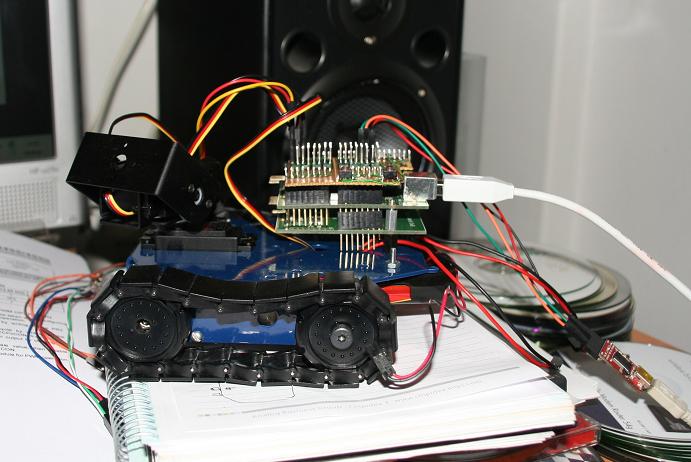
The upper board is just wiring for servos, sensors a USB/Serial converter ( using this for development, final version will use the bluetooth module )
And still missing the battery charger and power supply board ( once again copied from a Arduino shield , Hey, no need to be inventing the wheel again right? O:) )
At the moment is does absolutely nothing :D
Still working on the code, the basic part is done, moving motor and servos and reading from the sensors, just need to glue it all together.
It will also have a PC control software that I'm still trying to decide if Python or Processing based.
And that will be all for now, more updates to come soon ( I hope )
:)
navigate around and maybe do some mapping
- Actuators / output devices: (2) GM9's
- Control method: semi-autonomous or user-controlled all over Bluetooth to host PC.
- CPU: microchip pic18f4550
- Power source: 4x AA 1.5V for motors, 3.7V Li-ion 2000mAh
- Programming language: C ( C18 )
- Sensors / input devices: Ultrasonic ranger and infrared ranger
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/nameless-bot
