I'm pretty sure that the pins are soldered correctly to the board. I already re-soldered them 3 times and they look just like they do in the pictures that are in the instructions.
My motor contact fell off, so I followed the instructions on https://www.robotshop.com/letsmakerobots/node/9337 . I'm sure they are connected right because when I put a battery pack to them, they move. So the motors do work and aren't fried.
I'm sure that I connected the pins to the board right. I put both of the pins of the wheel on A, and the other pins of the wheel on B, just like the instructions.
I'm also sure that I put the chips to the board correctly.
Everything else work EXCEPT the wheels. The servo moves when I type in:
servo 0, 75
wait 2
Anyone have any ideas to why my wheels do not move? Both of them do not move.
don’t solder anything until you know the chip is going to work. try different combinations of high/low for 4,5,6,7, connecting the picaxe to the motor driver to the motor all on the breadboard. no soldering, just change which lead goes where right there on the breadboard. your code should work, so you now must check the connections on the chips and the motor.
will the motor move if you connect one side to 6v and the other side to G? Then it works.
If the Picaxe can blink an LED, then it works.
If both of those work and you don’t have a broken connection anymore, your motor driver is the problem. but the problem is 90% likely to be a broken or wrong connection. Do you have the papers that came with the project board? They contain a perfect schematic of how the h-bridge connects to the axe and the motor.
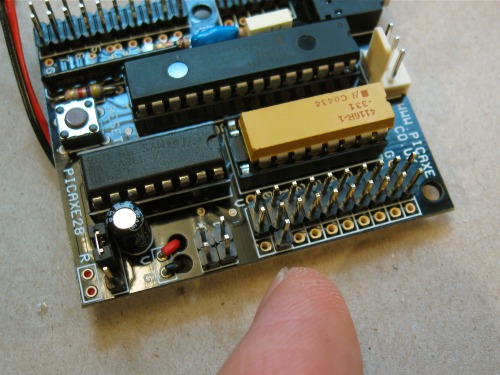
You see how that little indent on the right on all the chips is facing the right. Also did you swap out the chips? The one that came in that spot orginally is for sounds. You need to swap it to the L293D for driving the motors.
Via the shoutbox it was determined that the four header pins that connect to the motor were all connected together with one big ball of solder. After resoldering each pin to its own pad the motors worked as expected.
A story of success and a testament to the sturdiness of the L293D.