

this is my first robot it is just a simple one that nagiates around using IR to avoid obsticals it rotates it's self to look left and right. the looking is goverend by a random varaible to make so you dont know what it will do. I used Gm3 motors from solarbotics to drive and a L293D motor driver
the First Video is the fisrt platform
the Second video is with some refined code and a second battery pack
I conneced the motors by using a female to femal jumper and have put pins on the board and a pin in the end of each of the motors cables to make it easy to change it around.
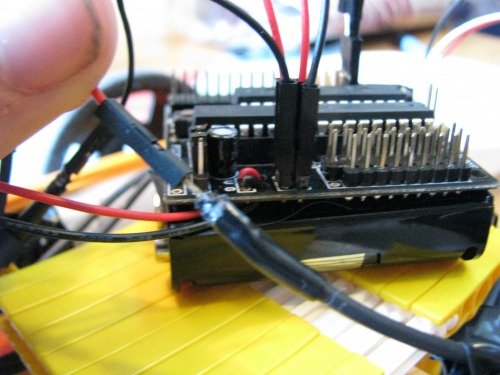
This is the connections for the motors. end of the wire to the motor is wraped in electrical tape (rubberey tape)
I also found that because this what my first robot I had bought a digital sharp sensor not knowing how much a diffrece there is between that on and the anlouge one I has also goten one of the cables for a analouge sensor pluged it in and it works just as I think that a analouge one.
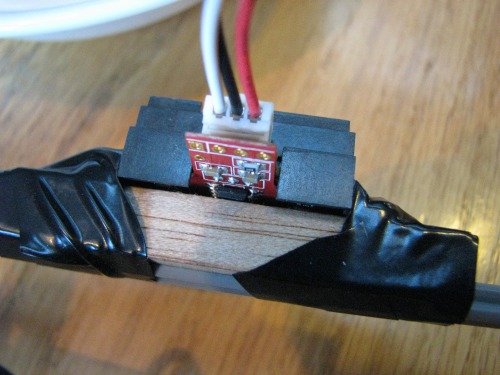
this is the digital sharp senson you can tell because I has the red backing (compared to the one i saw that was not red) working with an analouge cable.
Update 02/07/2009
I have added a 9v supply to v2 to run the motors so he is a little bit faster.
this is the robot with the new battery pack on hooked up to v2
Mudmule
I think that next I will lower the IR and add ultrasonic and then work at trying to get it to work off a battery solar panel mix.
Avoid obsticals with IR
- Actuators / output devices: 224:1 Solarbotics GM3
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/my-simple-bot

