

I’ve been working on building myself a rover for about 5 years, however I don’t have all the time in the world to devote to the fancy stuff some of you build! Regardless I’m proud of what I’ve done and it’s finally starting to work pretty well so I wanted to share.
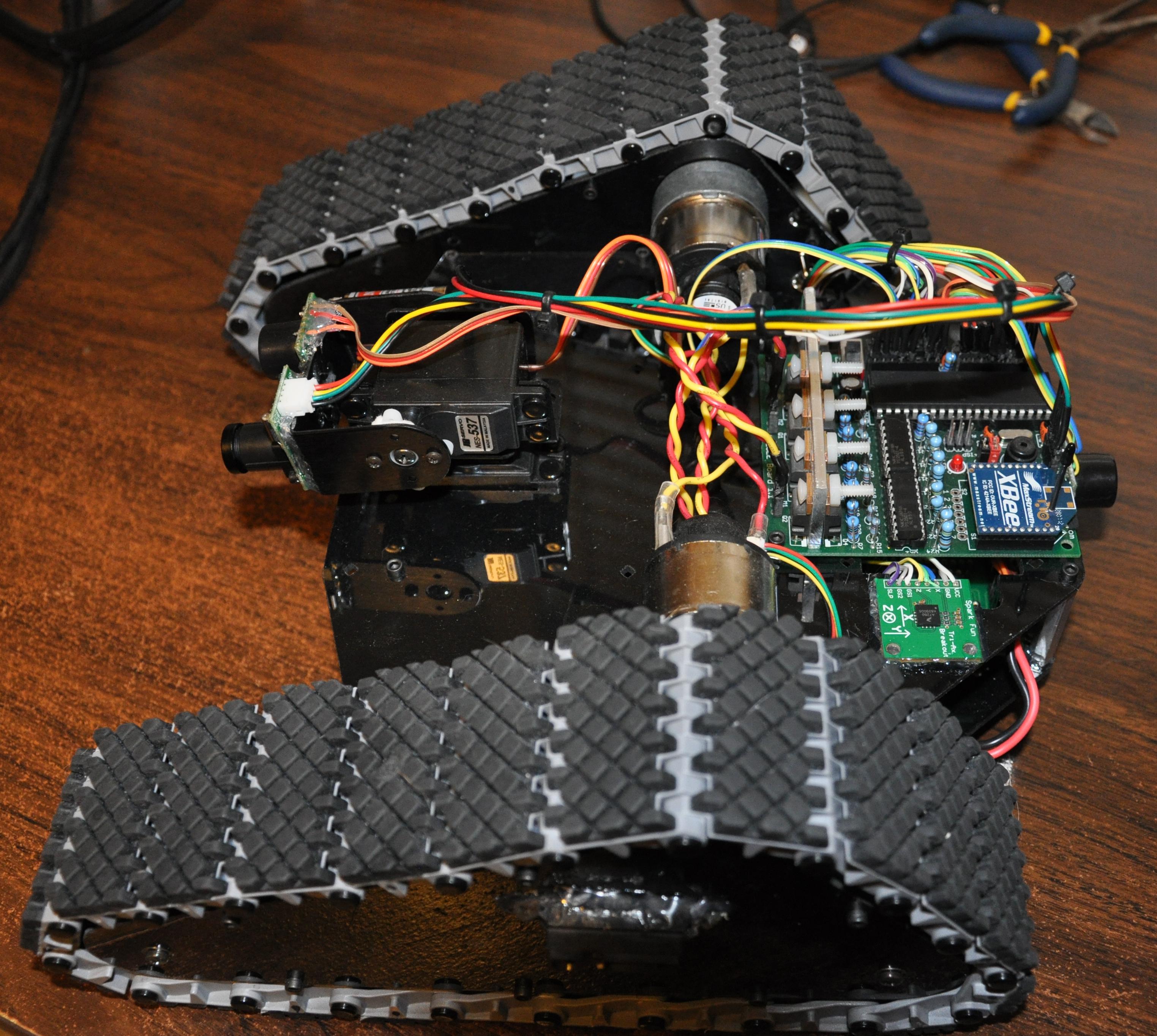
The Zulebot (lame name, maybe I’ll change it later) is powered by my own controller design which I call the Weegee board.
The WeeGee board is a project from my site, shadowmite.com. It’s design is open and free if you’re interested. I designed it well before the arduino stuff hit the market, now I might have gone that route instead… It’s general specs are:
8-Bit Atmel microcontroller with ISP port (running at 7.3728MHz) (ATMEGA644P)
16 easy access digital IO with Handyboard style connectors
8 of those can additionally be used as analog
1 Extra open serial port (4 pin header) (First is used for XBEE wireless)
2 Built in H-Bridges capable of motors with up to 4A draw (depending on heat sink used up to 8A)
X-Bee 2.4gHz Wireless Link on board complete with reset and sleep control from the AVR
3 Additional IO lines can be used from the ISP port if needed
Additional 2 IO lines from AVR + 8 from X-Bee available in non wired port under X-Bee
Those are shared with the LED and Piezo buzzer.
On/Off physical switch on main
Minimal power usage when X-Bee and AVR are in sleep mode
3.3V Logic used throughout
I2C Port is open on lines 0&1 of port c
MicroSD slot added using the SPI port
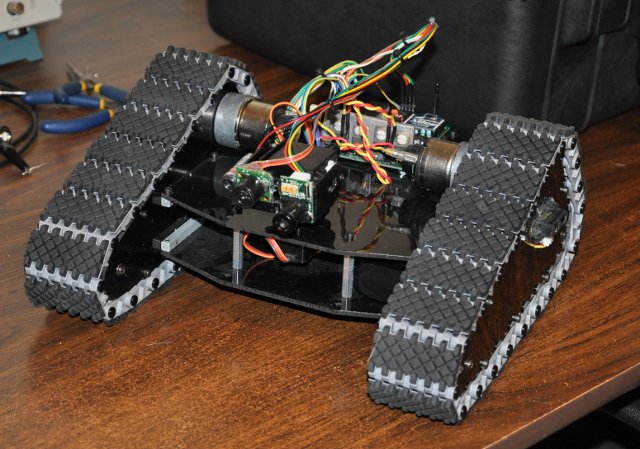
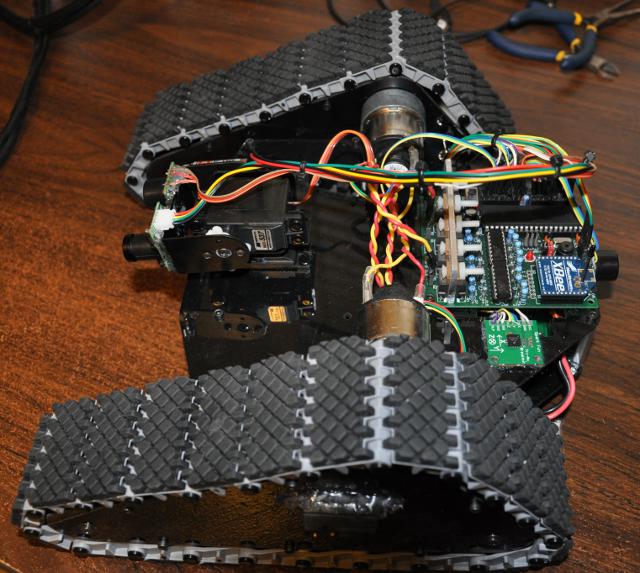
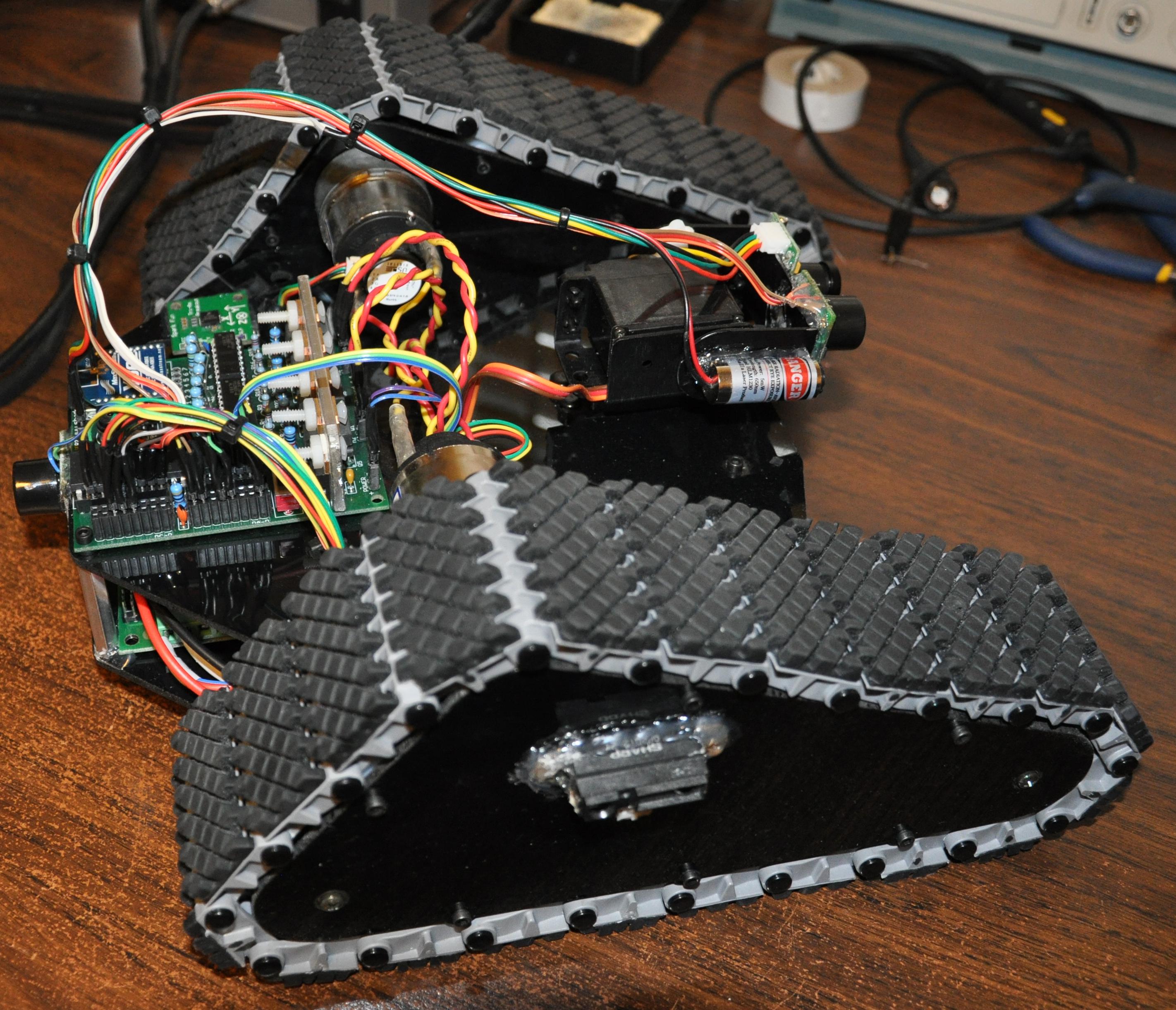
I’ve pretty much max’d it out running a lynxmotion tri-track chassis (the 7.2v motors with encoders) with:
2 sharp GP2D12’s (on the sides)
2 Maxbotics EZ1 Sonar sensors on the front and back (front on pan/tilt head)
1 Sparkfun Tri-Ax break out board
1 Daventech SD21 I2C 21 servo controller
1 C328R Serial camera module
1 Laser pointer module
Of course in the future I intend to build the servo controller into my weegee board, it’s already in the works but I figure that’s a few years off before I redesign it again. Regardless I’ve gotten it all working (save for fat filesystem on the sd slot, I only got raw mode so far). I’ve written a pretty extensive software library for it to where I can now use it pretty well as a remote rover. I still need to work on my automation routines, I hope oneday it can harass my cats on it’s own.
I’ll work on a video later, but here are some pics:
http://www.shadowmite.com/robot/Zulebot3LS.JPG
Those pics can also be seen in high res at:
shadowmite.com/robot/Zulebot1HS.JPG
shadowmite.com/robot/Zulebot2HS.JPG
shadowmite.com/robot/Zulebot3HS.JPG
 Looking forward to seeing it in motion.
Looking forward to seeing it in motion. Will they help the bot to go down hallways in a straight line rather than stupidly zig zagging down the hallway like most rovers do. Thats one of the things I think it could help with.
Will they help the bot to go down hallways in a straight line rather than stupidly zig zagging down the hallway like most rovers do. Thats one of the things I think it could help with.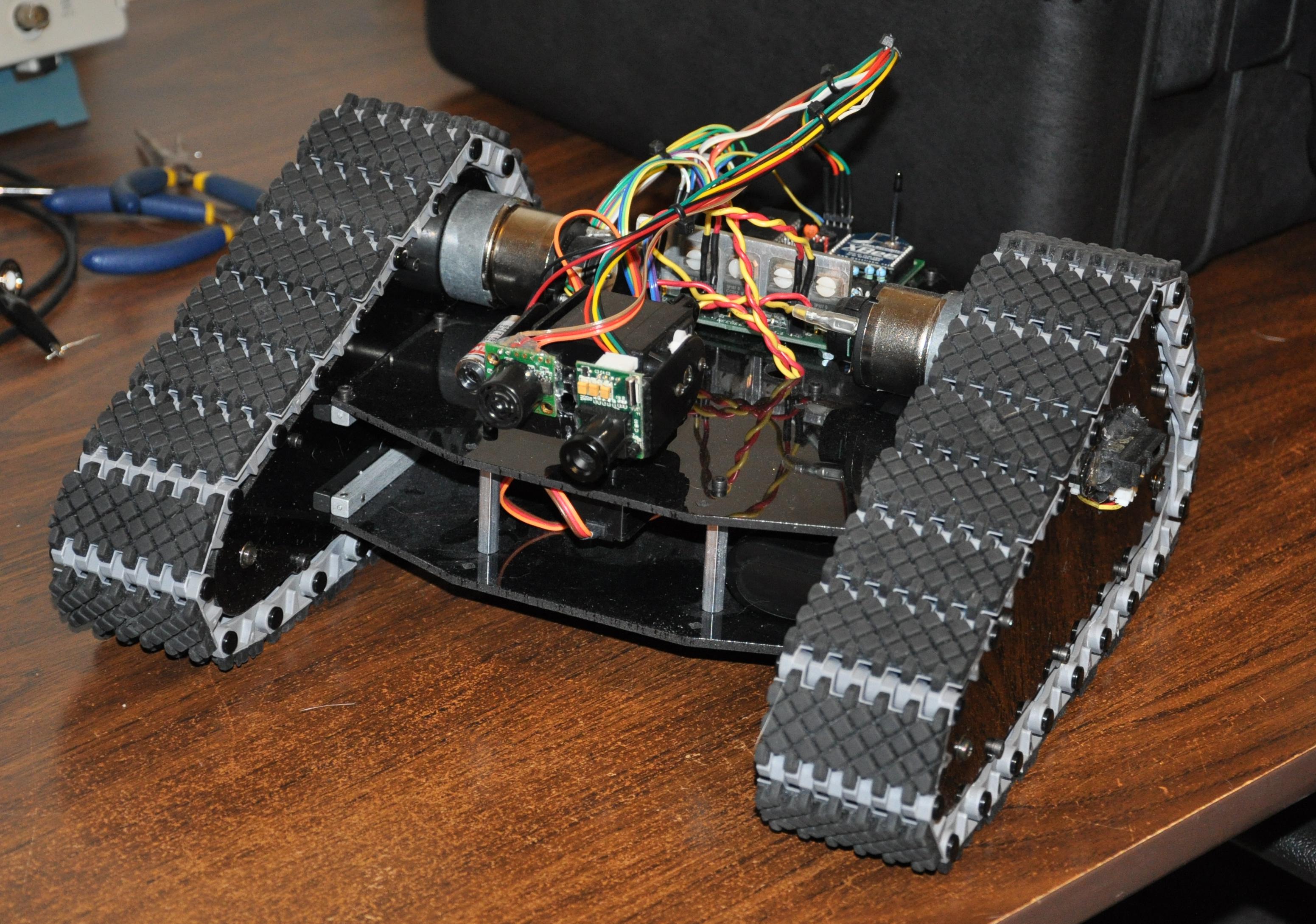{kind=link}
{kind=link}
{kind=link}