Nice job! Someone was asking about modifying the Lynxmotion arms a while back to lift more weight and it looks like you came up with some answers. It looks like you went from the old Lynx arm design in Chorg I to the SES in Chorg II.
Keep us informed of the software progress and post some videos of the thing in action and from the actual onboard camera or software vision if you can. That would be great to see.
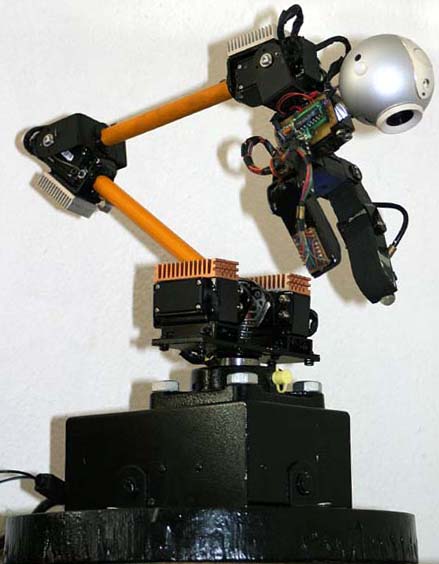
I am using 10 standard rc digital servos: 5 x HSR-5995TG, 1 x HS-5445MG for the wrist rotation and 4 Saturn DS50M for the gripper.
True, I am still an infant I will make the adjustment latter today. Thanks linuxguy for helping me out here
Yes, I counter balanced the arms weight with two springs, one at the shoulder level in between the base and the first segment and the other on the elbow axis. So far seems to be working fine once you fine tune the tension in the springs.
However the servos will “cry†a little and eat a lot of amps (over 30amps in total) when fully extended and under load so in the next revision I will probably reduce the arms size a little and improve on heat dissipation.
I will – right now I am working on improving the user interface and optimizing some routines in the real-time video processing engine. I hope to release a beta and perhaps someone here will want to help test it? I will also post some videos as soon as I will put my camera back together (after an unsuccessful attempt to modify it). I used to have two video one showing how the arm operates an electronic terminal – but I lost them somewhere in this huge pile of files …
Thanks Beth
I tried to log onto the free site with no luck. Will try again sometime when I am home. For those who questioned the ability of those motors being able to power a heavy bot. My bot weighs over 40 pounds and still works just fine with the motors tha came with the kit.
Bill


 What kind of servos are you using? Are they home built by you?
What kind of servos are you using? Are they home built by you?