Hallo Mario,hier ist der
Hallo Mario,
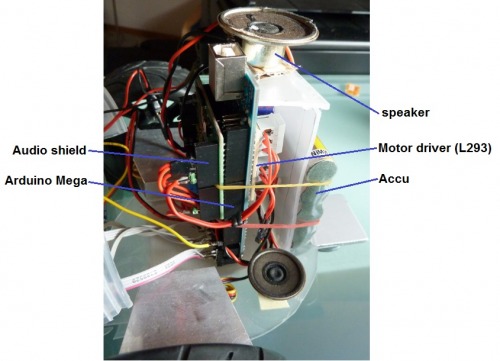
hier ist der chaotische Code. Dieser funtioniert wenn du auch aufgeführten libraries benutzt. AudioShield.h ist von ELV, die andereren müssten Standard sein.
Der Code ist etwas komlexer, weil ich eine Möglichkeit wollte, jederzeit über die serielle Schnittstelle das Kommando über den Roboter zu übernehmen. Diese funtioniert auch, ich habe es aber in meinem Beitrag nicht vorgestellt. Mit dem Befehl <99> wird der autonome Modus beendet und man den Roboter mit <1>, <2>, <3>, <4> steuern.
//Inputs/outputs
#include <SD.h>
#include <SPI.h>
#include <AudioShield.h>
#include <stdio.h>
#define L1 2
#define L2 9
#define LPWM 10
#define RPWM 45
#define R1 42
#define R2 43
long randNumber;
char string1[10];
char inData[10];
int index;
boolean started = false;
boolean ended = false;
unsigned long time;
byte Lspeed=200;
byte Rspeed=200;
int left, right, i, k, bottomState;
int LGled = 30;
int LRled = 31;
int RGled = 32;
int RRled = 33;
int bottomSensor = 21;
int Dur = 400;
int danger = 30;
int counter = 0;
typedef void (FunctionPointer) ();
// Declare looping actions function names, declared lower.
FunctionPointer xActions[] = {loopActionA,loopActionB,loopActionC};
// Define actions status flags. Set to 1 to auto execute a start.
int xActionsFlags[] = {1,1,0};
int xActionsCount = sizeof(xActions);
void xActionTrigger(int id=0, int action=0) {
// The id represent it’s position in the flags array.
// Action 1 = executed, 0 not.
xActionsFlags[id] = action;
}
// Exectute all loop functions.
void xDoActions() {
// Execute all looped function.
for(unsigned int j=0; j < xActionsCount; j++) {
if( xActionsFlags[j] == 1 ) { // Execute the action if.
xActionsj; // Call the related loop action.
}
}
}
// LOOPING FUNCTIONS
void loopActionA() {
// read serial data between < >
if (Serial.available() > 0) {
char aChar = Serial.read();
if(aChar == ‘<’)
{
started = true;
index = 0;
inData[index] = ‘\0’;
}
else if(aChar == ‘>’)
{
ended = true;
}
else if(started)
{
inData[index] = aChar;
index++;
inData[index] = ‘\0’;
}
if(started && ended)
{
char Pin[4]={inData[0],inData[1]};
char Value[4]={inData[2],inData[3],inData[4]};
// Convert the string to an integer
int inPin = atoi(Pin);
int inValue = atoi(Value);
//Serial.print("command: ");
Serial.println(inPin);
switch (inPin){
case 1:
Serial.println(“command forward”);
goForward();
delay(200);
Stop();
break;
case 2:
Serial.println(“command backward”);
goBackward();
delay(200);
Stop();
break;
case 3:
Serial.println(“command left”);
leftSpin(150);
Stop();
break;
case 4:
Serial.println(“command right”);
rightSpin(150);
Stop();
break;
case 8:
Serial.println(“command speak”);
randNumber=random(1,17);
if (randNumber > 10) sprintf(string1, “0%d.mp3”,randNumber);
if (randNumber < 10) sprintf(string1, “00%d.mp3”,randNumber);
sound(string1);
break;
case 11:
Serial.println(“auto mode”);
Stop();
xActionTrigger(1,1);
xDoActions();
break;
case 99:
Serial.println(“manual mode”);
Stop();
xActionTrigger(1,0);
xDoActions();
break;
}
}
}
}
void loopActionB() {
// autonomus drive
bottomState = digitalRead(bottomSensor);
if (bottomState == LOW){
left=Sensor( 24 , 25 );
delay(40);
right=Sensor( 26 , 27 );
delay(40);
if (left > danger && right > danger)
{
goForward();
counter = 0;
digitalWrite(LGled,1);
digitalWrite(RGled,1);
digitalWrite(LRled,0);
digitalWrite(RRled,0);
}
else if (left < 15 || right < 15)
{
Stop();
digitalWrite(LRled,1);
digitalWrite(RRled,1);
digitalWrite(LGled,0);
digitalWrite(RGled,0);
randNumber=random(1,17);
if (randNumber > 10) sprintf(string1, “0%d.mp3”,randNumber);
if (randNumber < 10) sprintf(string1, “00%d.mp3”,randNumber);
sound(string1);
goBackward();
delay(1000);
scan();
}
else if (left < danger || right < danger)
{
counter++;
digitalWrite(LGled,1);
digitalWrite(RGled,1);
digitalWrite(LRled,1);
digitalWrite(RRled,1);
Stop();
if (left>right && left>danger) {
//Serial.println(“left is better”);
leftSpin(Dur);
}
else if (right>left && right>danger){
//Serial.println(“right is better”);
rightSpin(Dur);
}
else if (right<danger && left<danger){
if (right=left || left>right){
goBackward();
delay(500);
leftSpin(Dur);
}
else if (right>left){
goBackward();
delay(500);
rightSpin(Dur);
}
if (counter = 8){
Stop();
sound(“013.mp3”);
goBackward();
}
}
}
else {
digitalWrite(LRled,1);
digitalWrite(RRled,1);
digitalWrite(LGled,0);
digitalWrite(RGled,0);
falling();
}
}
}
void loopActionC() {
// Do something…
}
int Sensor(int trigPin, int echoPin)
{
int duration;
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(5);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
duration = duration / 58;
return duration;
}
void ForwardR(){
digitalWrite(RPWM,Rspeed);
digitalWrite(R1,HIGH);
digitalWrite(R2,LOW);
}
void ForwardL(){
digitalWrite(LPWM,Lspeed);
digitalWrite(L1,HIGH);
digitalWrite(L2,LOW);
}
void BackwardR(){
digitalWrite(RPWM,Rspeed);
digitalWrite(R1,LOW);
digitalWrite(R2,HIGH);
}
void BackwardL(){
digitalWrite(LPWM,Lspeed);
digitalWrite(L1,LOW);
digitalWrite(L2,HIGH);
}
void Stop(){
digitalWrite(RPWM,0);
digitalWrite(LPWM,0);
digitalWrite(R1,HIGH);
digitalWrite(R2,HIGH);
digitalWrite(L1,HIGH);
digitalWrite(L2,HIGH);
}
void goForward(){
ForwardR();
ForwardL();
}
void goBackward(){
BackwardR();
BackwardL();
}
void leftSpin(int spinDur){
BackwardL();
ForwardR();
delay(spinDur);
}
void rightSpin(int spinDur){
BackwardR();
ForwardL();
delay(spinDur);
}
void falling (){
goBackward();
delay(400);
BackwardL();
ForwardR();
delay(800);
}
void scan(){
if (left>right && left>danger) {
//Serial.println(“left is better”);
leftSpin(Dur);
}
else if (right>left && right>danger){
//Serial.println(“right is better”);
rightSpin(Dur);
}
else if (right<danger && left<danger){
if (right=left || left>right){
goBackward();
delay(500);
leftSpin(Dur);
}
else if (right>left){
goBackward();
delay(500);
rightSpin(Dur);
}
}
}
void sound(const char mpFile){
//Puffer für MP3-Decoder anlegen
//MP3-Decoder erwartet Daten immer in 32 Byte Blöcken
unsigned char buffer[32];
//Datei öffnen und abspielen
if( File SoundFile = SD.open(mpFile, FILE_READ) )
{
//Blaue LED während dem Abspielen leuchten lassen
LED_BLUE_ON;
//Verstärker einschalten
VS1011.UnsetMute();
//Datei bis zum Ende abspielen
while( SoundFile.available() )
{
//Puffer mit Daten aus der Datei füllen
SoundFile.read( buffer, sizeof(buffer) );
//Daten aus Puffer an MP3-Decoder senden
VS1011.Send32( buffer );
}
//Internen Datenpuffer vom MP3-Decoder mit Nullen füllen
//damit sicher alles im Puffer abgespielt wird und Puffer leer ist
//MP3-Decoder besitzt 2048 Byte großen Datenpuffer
VS1011.Send2048Zeros();
//Verstärker deaktivieren
VS1011.SetMute();
//Blaue LED nach dem Abspielen ausschalten
LED_BLUE_OFF;
//Datei schliessen
SoundFile.close();
}
else
{
//Datei nicht gefunden
//Rote LED für 2s leuchten lassen
LED_RED_ON;
delay( 2000 );
LED_RED_OFF;
}
}
void blinkyEyes(){
for (int i=0; i<3; i++){
digitalWrite(LGled,1);
digitalWrite(RGled,1);
delay(350);
digitalWrite(LGled,0);
digitalWrite(RGled,0);
delay(200);
}
}
//--------------------------------------------------------------------------
void setup() {
// set motor pins as output and LOW so the motors are braked
Serial.begin(9600);
pinMode(L1,OUTPUT);
pinMode(L2, OUTPUT);
pinMode(LPWM, OUTPUT);
pinMode(RPWM, OUTPUT);
pinMode(R1, OUTPUT);
pinMode(R2, OUTPUT);
pinMode(LGled, OUTPUT);
pinMode(LRled, OUTPUT);
pinMode(RGled, OUTPUT);
pinMode(RRled, OUTPUT);
pinMode(bottomSensor, INPUT);
//digitalWrite( 12 , LOW );
//pinMode(LedPin, OUTPUT);
//digitalWrite(LedPin, LOW);
xActionTrigger(0,1); // First action active
xActionTrigger(1,1); // Second action active
//Einrichten der LEDs
pinMode(LED_BLUE, OUTPUT);
pinMode(LED_RED, OUTPUT);
//beide LEDs ausschalten
LED_BLUE_OFF;
LED_RED_OFF;
//SD-Karte initialisieren
//SD_CS als parameter übergeben, da hier ChipSelect anders belegt
if( SD.begin( SD_CS ) == false )
{
// Programm beenden, da keine SD-Karte vorhanden
return;
}
//MP3-Decoder initialisieren
VS1011.begin();
blinkyEyes();
sound(“010.mp3”);
//attachInterrupt(2, falling, RISING);
}
void loop()
{
xDoActions();
}


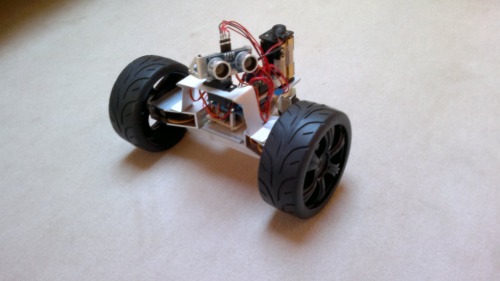
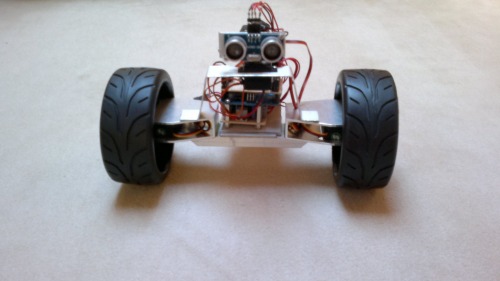



 I really like that big wheels.
I really like that big wheels.