While I wait for the geared motors to arrive in my mail, I have continued the work on the software.
Since it is my first robot with behavior a bit more complex than the Gwünderer ( https://www.robotshop.com/letsmakerobots/node/30544 ) it is programmed a bit more Clean Code style.
The behavior of this robot is implemented with the state-pattern in combination with the strategy-pattern. The state is determined by the sensor and contains the relevant motor configuration to apply. That might be "Don't Panic! Go Ahead!" or "Turn Left (since there is most space)" or "Backwards now!". The strategy determines how this is fulfilled. So is a "Go Ahead" a simple motor forward while a "Backwards" is a motor backward followed by a u-turn.
You find the source code here: https://github.com/mnemonia/robotix/tree/master/MyFirstRobot
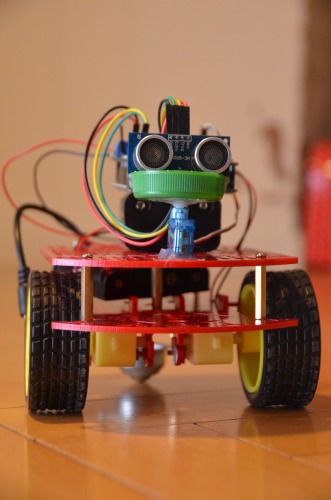
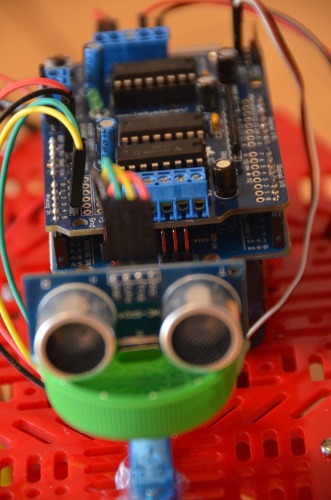
Oooh! Nice Bot! I really liked the Gwunderer… But this is cool as well! Where did you get the chassis? And what is that shield? And this bot is very neat!
…and yes. Code is from me. Implementation with the notion of state. A state is forwardStatewhere both motors have the FWD setting and the sensor is adjusted accordingly. It stays in this state until some object in the way gets detected. Depending on the distance from the robot to the obstacle an other state gets activated. If the obstacle is very close then the robot changes to backwardUturnState and turns around.