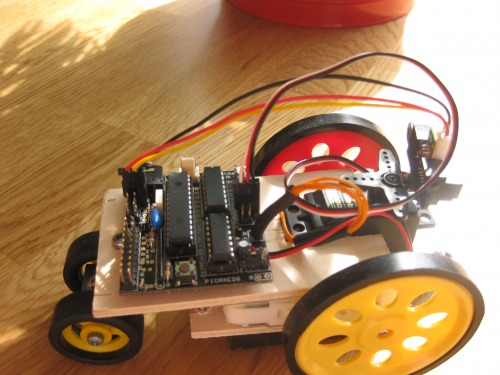
Hi people , i creat my first robot ! My robot avoids the obstacles and looks for a better road.I used tools classic to create my robot as: crowbar(pliers), of the thread, the tin, the iron has to weld… For the construction of my robot I put 1:30 am and for the programming I made copy / stick of the tutorial xD. If you find things has to say on my robot of the good as the bad do not hesitate, I am to learn :)ok ok thank you for watching.
Post your robot and where Post your robot and where you are stuck with the code and we will help you fix it. Making a robot to work with code is backwards and will cause lots of problems. ALWAYS build the robot then work on the code. Dont try to use someone else’s code to build your robot.
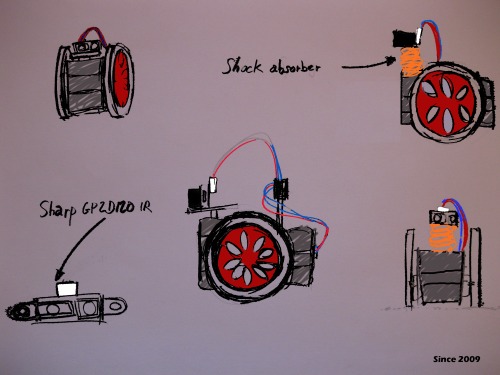
well i have my picaxe hooked up to two LRD29 motor controllers. all the movement commad work fine , except for the SCANING part … i have a servo fixed to it and i just cant get it to work :S. the IR mounted on it however , reads info.
Im in skool right now , i will post the code as soon as i get home , its on my laptop


 Hi people , i creat my first robot ! My robot avoids the obstacles and looks for a better road.I used tools classic to create my robot as: crowbar(pliers), of the thread, the tin, the iron has to weld… For the construction of my robot I put 1:30 am and for the programming I made copy / stick of the tutorial xD. If you find things has to say on my robot of the good as the bad do not hesitate, I am to learn :)ok ok thank you for watching.
Hi people , i creat my first robot ! My robot avoids the obstacles and looks for a better road.I used tools classic to create my robot as: crowbar(pliers), of the thread, the tin, the iron has to weld… For the construction of my robot I put 1:30 am and for the programming I made copy / stick of the tutorial xD. If you find things has to say on my robot of the good as the bad do not hesitate, I am to learn :)ok ok thank you for watching.