From all the inspiration i got from reading posts by you guys, i thought of doing the same thing - creating a robot on my own. Thanks for the awesome work guys, keep it going, there are more like me out there who need some inspiration - I will try to follow the path you guys have set to explore myself :).
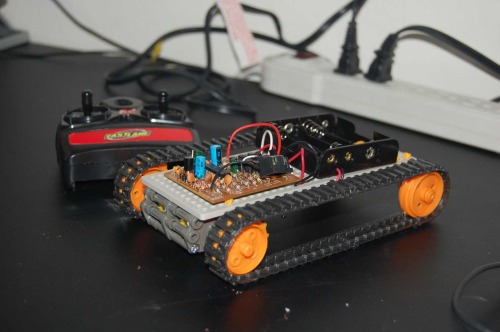
Ok so i read many blogs here and started thinking about creating one myself. So i found out the stuff i need online and ordered them. I got the platform, gearbox and stuff delivered yesterday - I am still waiting on the PICAXE kit, the TI motor driver SN754410 and the other electronics to be delivered. So in the meanwhile since i was done assembling the gearboxes and the platform the way i wanted - i started out to create a RC version of this robot. For the RC circuit - i just scavenged it from my kids old RC car that was lying around seeking attention :). So i just stripped it bare and took out the RC + H Bridge circuitry - after taking a hard long look at the circuit i figured out the contact points and the way i needed to solder the motor endpoints. All said and done i got a working RC Robot - a precursor to the one with brains :).
i am using the following parts
From Superdroid Robots: Track and Wheel Set, Tamiya Twin Motor Gearbox, Tamiya Universal Plate Set -
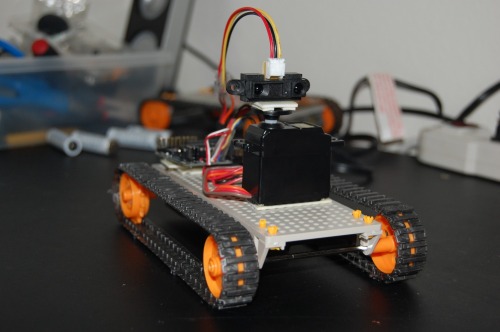
The one in the first picture is the RC One and the following are the pictures of the one which is "Work In Progress". Will keep you posted.
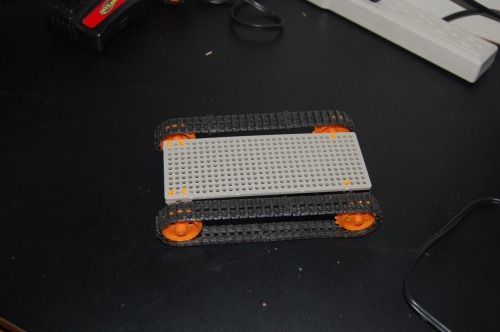
The top view of the assembled platform.
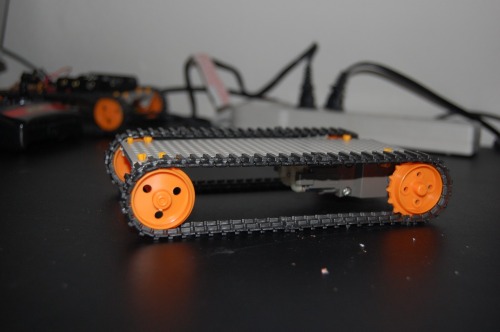
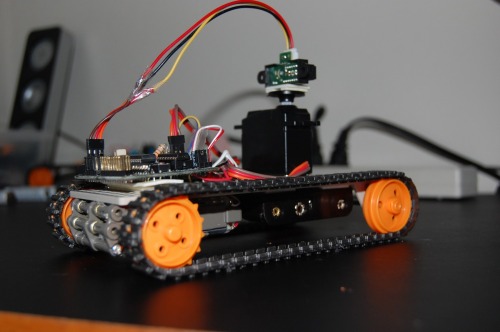
The profile view :)
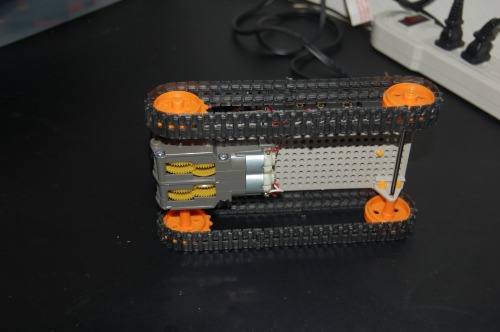
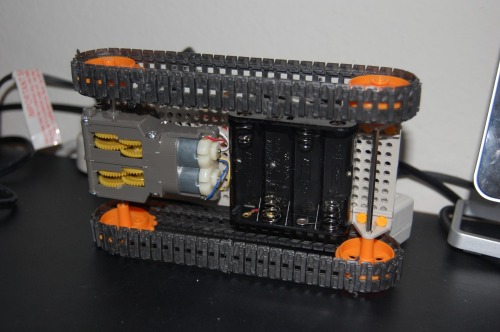
and the gear box
so finally i got all the parts and time to put them together. The end result - my first robot Rover - thanks a bunch Frits for the detailed "How to make your first robot" tutorial.
This is what Rover looks like. With some pbasic (pretty basic :)) code i was able to make it run own its own and make decision as to where to go next. Below are some more pics - now that i am pretty busy playing with my new toy :) - i will add a video as soon as i get time to.
The next thing is to add a ARM based Linux board (that is lying around on my desk :)) on top and use its GPIO's to control the Robot. Once thats done i am thinking of adding some Wireless LAN capabilities to it :). Which will give me a way to control it over the network using my laptop.
Navigate around avoiding obstacles
Actuators / output devices: Tamiya twin gearbox
CPU: Picaxe 28x1
Power source: 4 AAs (1.2V each)
Programming language: Picaxe basic
Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
You could actually save what you have got, and just add the "brains" to it.
Let the RC signals (On/off) enter the digital inputs.
It can be done after the H bridge (simply insert the Picaxe instead of the motors, and add the motors to the Picaxe), or if you are really fancy, you jump in before the H-bridge, send the signals to the Picaxe, and let the Picaxe send to the H bridge
Under all circumstances it will be good fun to have the extra option, and your platform has the space for it.
Nice job. There’s something fun about building your own R/C vehicle, even if it doesn’t technically count as a robot yet. Just having something to drive around that you built yourself. Good luck with the rest of the project.
Thanks, and that was a real Thanks, and that was a real nice idea. I am actually planning to add some wireless capability to the brains :). So that i can control it from my laptop if need be. I checked the radio chips that you had mentioned about but those are quite expensive and run out of my budget. Any other ideas? I am thinking bluetooth or something that i can interface to PICAXE.
I’m planning to do a similar robot. When I look at the spec of the gearbox on the roboshop site I’m not sure if I should go with the 70097 or the 70168 gearbox. They both have the FA-130 motor but in the spec motor current for the 70168 is stated at .66A and for the 70097 at 2.1A ??? 2.1A is not too high for the SN754410 ?
Stall is not where the motor will be running usually. Brushed DC motor graphs have a straight line from a free run speed where they draw the lowest current, on up to the stall where they draw the most current. So when the motor is running fastest, it may only draw 300 to 400 mA (estimate from data) but if the robot runs into a wall and the wheels stop, the motor current will hit a high, and the 754410 could shut down, or possibly fry if the batteries used are strong enough. The stall current of 2.1 A is too high for the 754410, and that figure is what is listed for only 3 volts across the motor.
The operating voltage required by the 754410 is also slightly high for the FA-130 to last a normal life. Using the motors at a higher voltage means there will be a higher current draw than that listed, since the motors effective resistance remains the same. The 754410 has a minimum motor supply voltage of 4.5 volts. The bridge loses around 1.2 volts across the internal transistors, so the effective voltage delivered would be 3.3, just slightly above the 3.0 volts listed for the FA-130. You might typically use a 4 AA rechargable pack, that would be around 4.8 volts, giving an effective voltage across the motors of 3.5 volts. Other things like battery internal resistance, etc contribute, but hopefully that gives some idea of what’s going on.
Pololu has an h-bridge they pair with the twin motor gearbox, that should work with the FA-130 motors on either gearbox yopu have listed. The 4 speed 70168 might be interesting to experiment with, to have you robot haul big loads in low gear, or sprint in high gear.
I got all the components delivered today. Will let you know how good the 754410 - FA-130 Combo is once i am done assembling them :). By the way mine is a 70168 gear box. The reason i went for 754410 is because its pin-to-pin compatible with L293D and i read in one of the forums that the power output of 754410 is better than L293D when FA-130 is used.
Thanks. I know more now. I thought I knew motors… I have one in my car… many in things in the house… you put energy, it runs, everybody happy.
I’ve look at the link you gave, then explore more and more… wow ! Robot motor are a science ! I got many r/c car at thrift shop and other places like that, planning to convert to robot… was wondering about all the differences I saw in their battery/power required. I’m begginning to understand. Will have to do more homework…
…since I was planning to order my motor/gear today, will wait…
I already have some SN754410 also some TA8080k and I’ve desolder L298 from old printer pc board… Bought the tamiya universal plate on ebay(2.99 + s/h), will probably order my Picaxe tomorrow, not decided yet wich one…
For my part, I’ve bought it on Ebay from 1sthobbymodel they can make a “listing” with the parts you need, save on s/h. I’ve made a suggestion to them, list the tree item as a robot base kit. Don’t know how long it’ll take to get here, I can post when it arrives.