



My First Robot (Rover)
From all the inspiration i got from reading posts by you guys, i thought of doing the same thing - creating a robot on my own. Thanks for the awesome work guys, keep it going, there are more like me out there who need some inspiration - I will try to follow the path you guys have set to explore myself :).
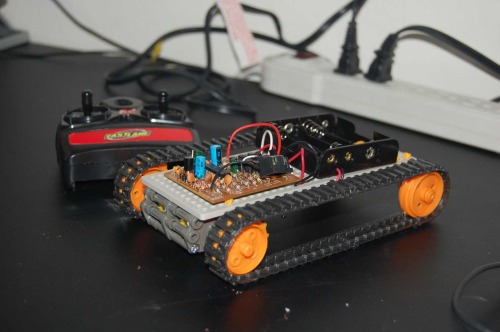
Ok so i read many blogs here and started thinking about creating one myself. So i found out the stuff i need online and ordered them. I got the platform, gearbox and stuff delivered yesterday - I am still waiting on the PICAXE kit, the TI motor driver SN754410 and the other electronics to be delivered. So in the meanwhile since i was done assembling the gearboxes and the platform the way i wanted - i started out to create a RC version of this robot. For the RC circuit - i just scavenged it from my kids old RC car that was lying around seeking attention :). So i just stripped it bare and took out the RC + H Bridge circuitry - after taking a hard long look at the circuit i figured out the contact points and the way i needed to solder the motor endpoints. All said and done i got a working RC Robot - a precursor to the one with brains :).
i am using the following parts
From Superdroid Robots: Track and Wheel Set, Tamiya Twin Motor Gearbox, Tamiya Universal Plate Set -
From Sparkfun:
Infrared Proximity Sensor - Sharp GP2Y0A21YKPICAXE Serial Programming Cable
PICAXE-28X Starter Pack
H-Bridge Motor Driver 1A Ti - SN75441
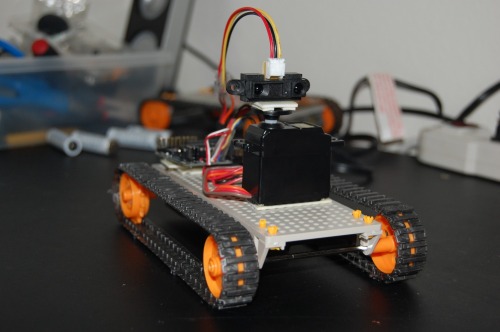
The one in the first picture is the RC One and the following are the pictures of the one which is "Work In Progress". Will keep you posted.
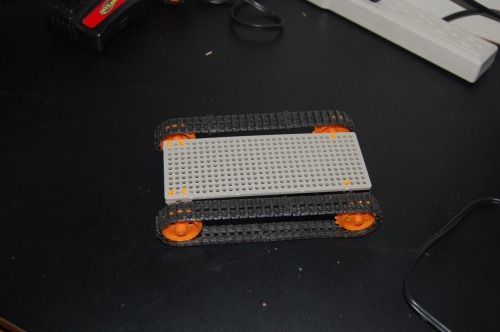
The top view of the assembled platform.
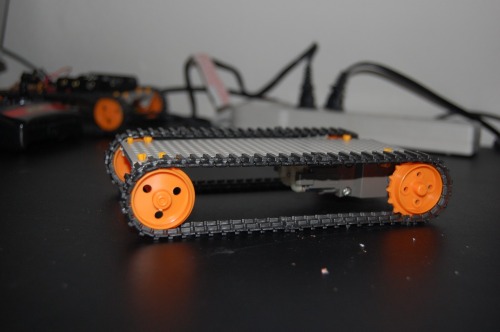
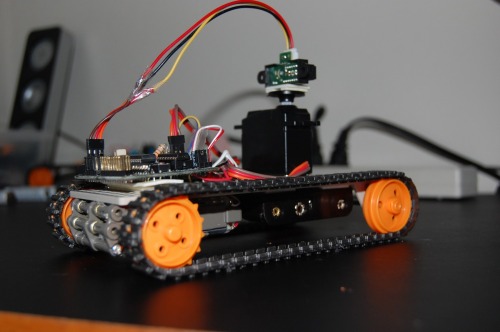
The profile view :)
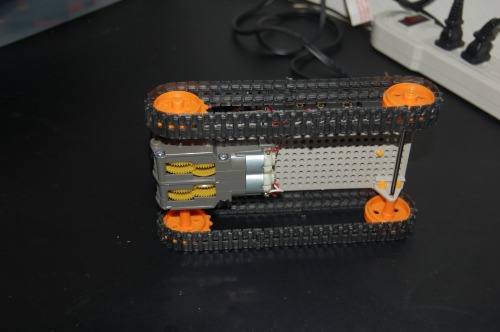
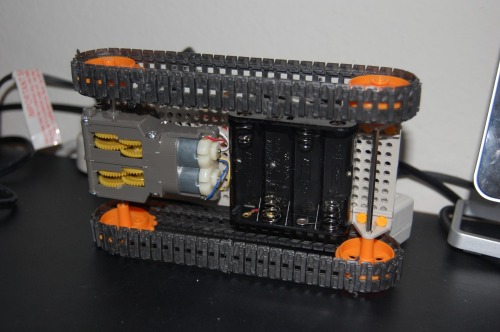
and the gear box
so finally i got all the parts and time to put them together. The end result - my first robot Rover - thanks a bunch Frits for the detailed "How to make your first robot" tutorial.

This is what Rover looks like. With some pbasic (pretty basic :)) code i was able to make it run own its own and make decision as to where to go next. Below are some more pics - now that i am pretty busy playing with my new toy :) - i will add a video as soon as i get time to.
The next thing is to add a ARM based Linux board (that is lying around on my desk :)) on top and use its GPIO's to control the Robot. Once thats done i am thinking of adding some Wireless LAN capabilities to it :). Which will give me a way to control it over the network using my laptop.
Navigate around avoiding obstacles
- Actuators / output devices: Tamiya twin gearbox
- CPU: Picaxe 28x1
- Power source: 4 AAs (1.2V each)
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
- Target environment: indoors mainly