I started this back in May but he, she or it had the servo and sensor mounted on top of the base. I found it kept missing ‘seeing’ obstacles so recently moved the sensor to the front of the base. Well it still messes up sometimes but now it has that nice tilting motion like Fritsl’s robot in part 2.
Before:
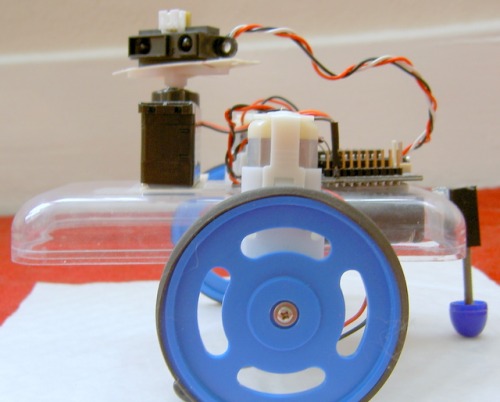
After:
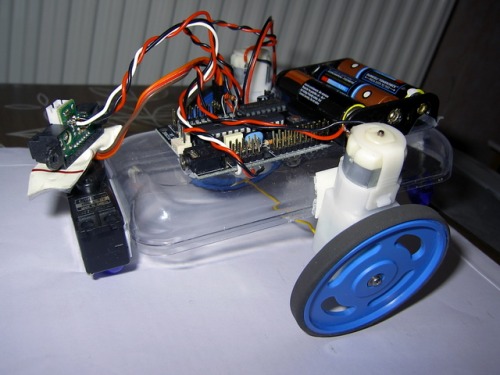
Other views:
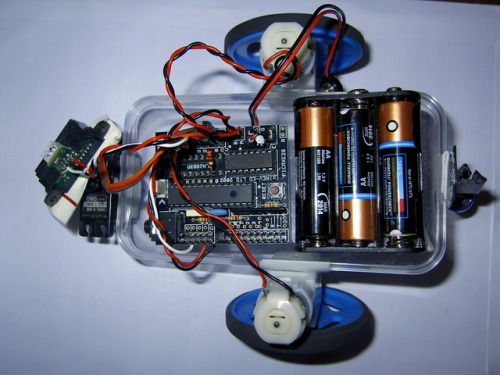
A top-down shot giving the slightly misleading impression that it's fallen apart (it hadn't quite in this picture!)
The code is based on the standard code that use to be posted here, but simplified and modified to work with this configuration.It doesn’t look to see if there’s anything interesting to go and explore and also it doesn’t count how many times its turned in those places where it should back up and turn around.
Things to do:
Refine code.
Add another sensor at the lower front.
Add a few LEDs.
Add some squeaks and beeps.
Teach it to make a decent cup of tea!!
(p.s.Excuse the messy carpet in the video, the culprit was in the vid!)
obstacle avoider
Actuators / output devices: 6v sealed gear motors
Control method: autonomous
CPU: Picaxe 28x1
Power source: 3 AA cells
Programming language: Picaxe basic
Sensors / input devices: Sharp GP2Y0A21YK0F IR sensor
I like the way that you have the sensor / turret “lock” on an obstacle, and move away from it until clear, before continuing.
I haven’t thought of that. It makes perfect sense to me now though. I was just backing away, continuing my scan. Sometimes I’d find myself painted into a corner, backing away, and then returning to the same place, only to repeat it over and over.
I got it to do that purely I got it to do that purely by fluke let me tell you. That idea was inspired Fritsl’s robot’s which quaintly “examine” the obstacles as they pass it. I have no idea how mine does it though I think there’s a bit of chaos in the works in there somewhere! (Probably impreciseness due to my bad coding and electrical noise from the motors or something.)