

Hello everyone!!!!
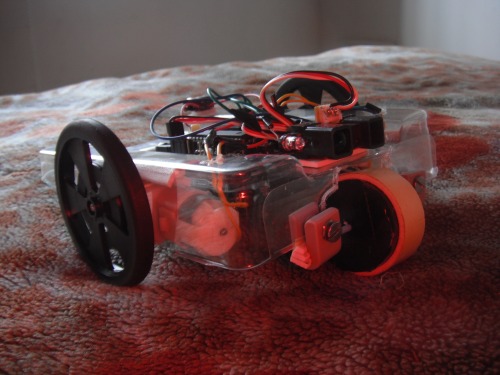
Ya this guy is mine :D Not that bad na ??

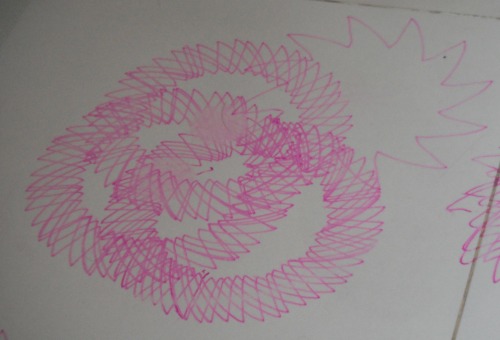
Taugh wall-e prototype to draw Rangoli.
Check video in youtube for more description.
Taught it to write, here it writes LMR
Really an amateur but nevertheless it is satisfactory :)

The neck does not rotate because we got a continuos rotation servo in our kit so its used to keep turning and turning trying to suicide. So we had to make our own program to make it turn etc etc.
I'm trying to make this as short as possible because this will be more of a discussion than me talking only about my robot.
I have just startedmaking robots actually with help of LMR and my friends. This is my first successful one...I know I know this is what I have just copied from https://www.robotshop.com/letsmakerobots/start ofcourse this is true, this is where you all must have started your robot venture (thanks a lot fritsl!!! :P ).
Anyway coming to the point me and my friend have decided to take the whole of May to make new and better robots (now that we know the basics..well almost ).

I know many of you have done this exact robot. I really wish to know what all new things did you try on the same robot using the same picaxe board, for example putting some LED or buzzers as fristl stated.
We are going to try making "legs" for the little guy, for this I will really need some help and assisstance from you all.
Reply in your ideas, how you have meddled with your robot.. dont feel shy to post pics of your robot.
You can post even the unique program that you wrote just to share so that others can get more ideas. :D

(this guy is wat i want to make! help me !!)
Lets go make the future even more WOW!!!! :D :P
Just comment you robot enthusiast :P
Navigates around slightly handicapped because it cant turn its neck
- CPU: Picaxe 28
- Programming language: Axepad
- Sensors / input devices: Sharp IR
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/my-first-robot-and-your-cool-ideas

